
Arduino Ping
The Ping ultrasonic range finder is a compact and efficient device designed for distance measurement applications. Its operation is based on the principles of sonar, where it emits a high-frequency sound wave and measures the time taken for the sound wave to reflect off an object and return to the sensor. This capability allows the Ping to accurately measure distances ranging from 2 centimeters to 3 meters, making it suitable for various robotics and automation projects.
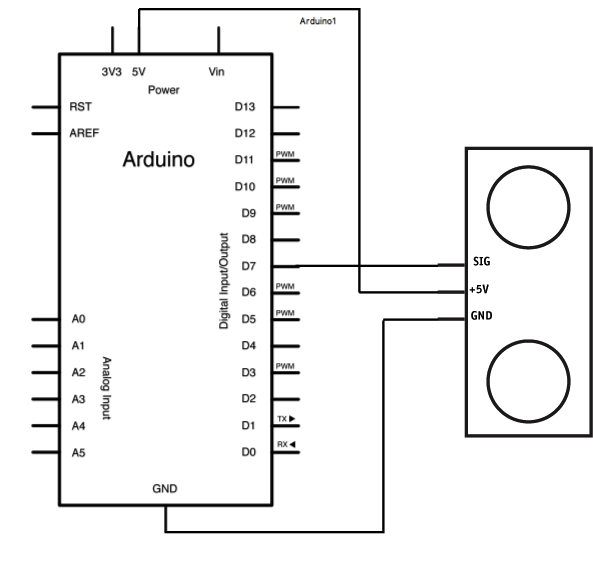
In a typical configuration, the Ping sensor is powered by a 5V supply, which is commonly provided by an Arduino board. The GND pin establishes a common ground between the sensor and the Arduino, ensuring proper operation. The SIG pin is the critical interface for communication between the sensor and the Arduino. When the Arduino sends a trigger pulse to the SIG pin, the Ping sensor emits an ultrasonic pulse. The Arduino then listens for the returning echo using the pulseIn() function, which measures the duration of the received signal.
To calculate the distance to the object, the time measured is divided by two (to account for the round trip of the sound wave) and multiplied by the speed of sound in air, which is approximately 343 meters per second at room temperature. This calculated distance can then be used in various applications, such as obstacle avoidance in mobile robots, distance measurement in automation systems, or even simple range-finding tasks in hobby projects.
The integration of the Ping sensor with an Arduino is straightforward, requiring only a few connections and a simple program to handle the timing and calculations. The versatility and ease of use of the Ping ultrasonic range finder make it an ideal choice for both beginners and experienced developers in the field of electronics and robotics.The Ping is an ultrasonic range finder from Parallax. It detects the distance of the closest object in front of the sensor (from 2 cm up to 3m). It works by sending out a burst of ultrasound and listening for the echo when it bounces off of an object. The Arduino board sends a short pulse to trigger the detection, then listens for a pulse on the s ame pin using the pulseIn() function. The duration of this second pulse is equal to the time taken by the ultrasound to travel to the object and back to the sensor. Using the speed of sound, this time can be converted to distance. The 5V pin of the PING) is connected to the 5V pin on the Arduino, the GND pin is connected to the GND pin, and the SIG (signal) pin is connected to digital pin 7 on the Arduino.
🔗 External reference
Related Circuits
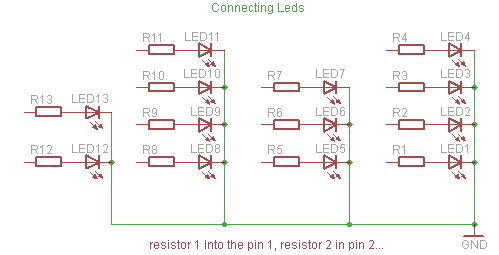
Yesterday, a decision was made to abandon watching a movie in favor of building a binary clock. After some contemplation on the programming aspect, the project was successfully completed. The clock operates effectively, and a detailed explanation of the...
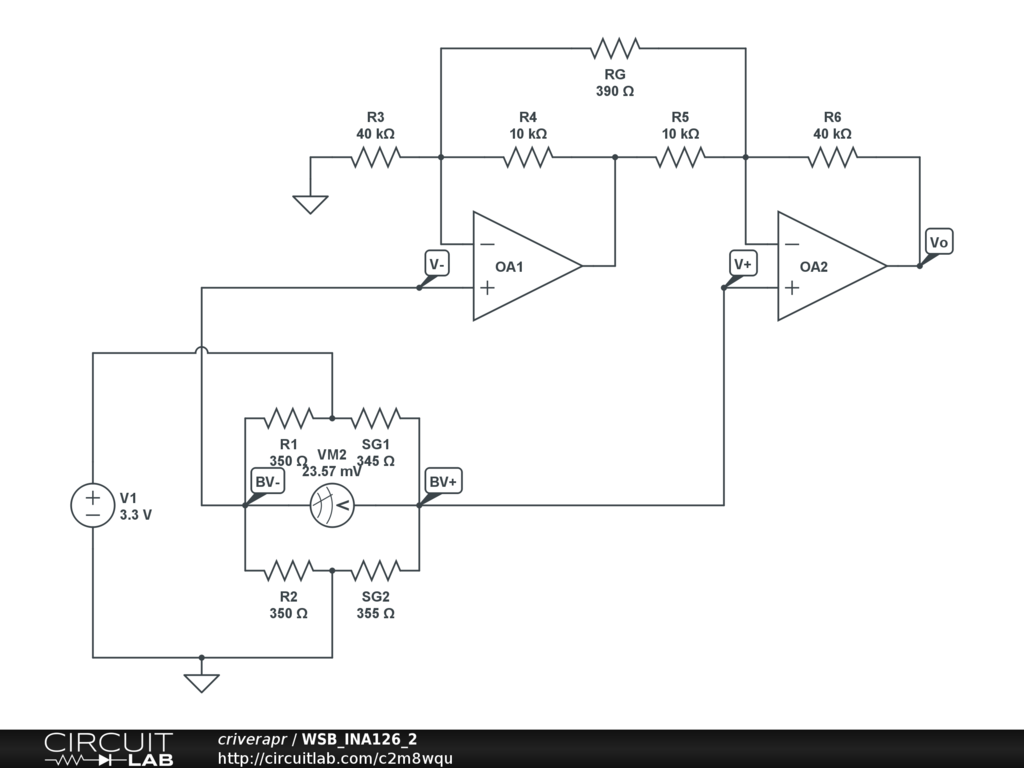
A half-bridge setup is utilized with strain gauges and an INA126 to amplify the voltage. The voltage can be read accurately when the lever is bent in one direction; however, no reading is obtained when the lever is bent...
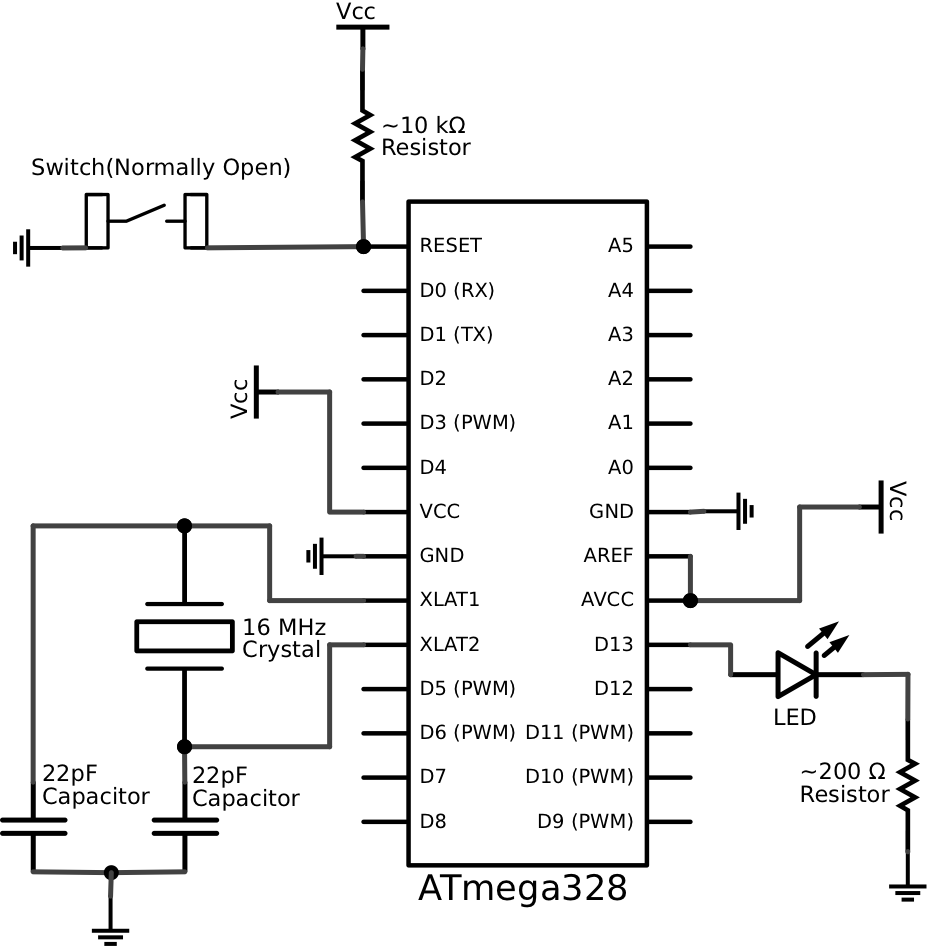
This schematic represents a minimalistic circuit that includes only the essential components required for operating an ATmega328 microcontroller with the Arduino Uno bootloader. The design of the voltage regulation circuit is left to the user. Connections to AREF and...
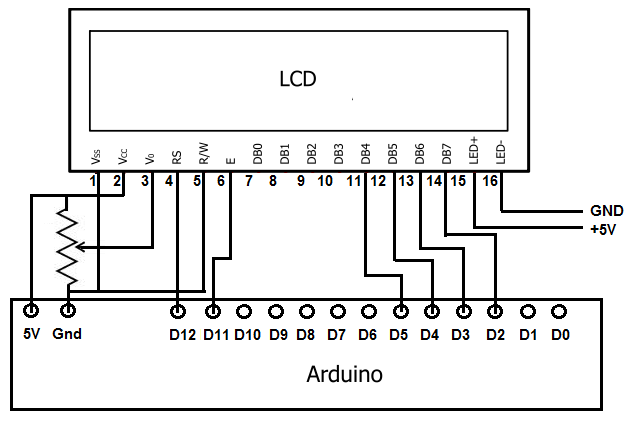
To achieve this, the first step involves establishing the necessary physical connections between the Arduino board and the LCD. Following this, code must be written to display the desired text on the LCD. LCDs have become the standard means...
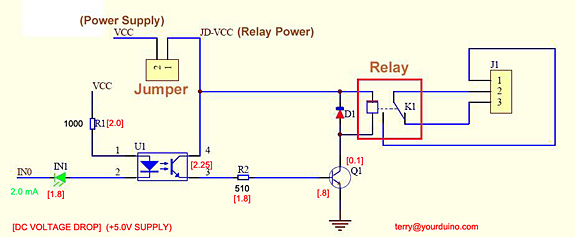
Control a relay from an Arduino-compatible board. When attempting to activate the relay from the Arduino, it takes at least a second to close, and sometimes it does not close at all. Digital pin 2 of the Arduino is...
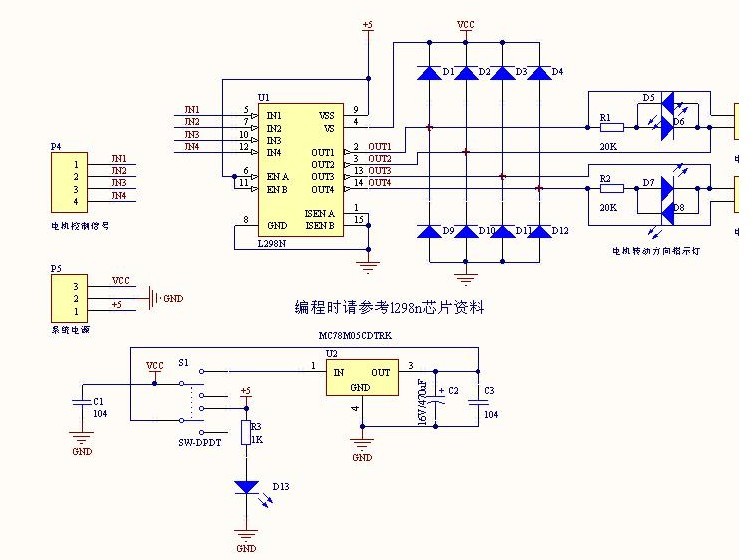
The L298N driver module incorporates the ST L298N chip, commonly utilized to drive two DC motors with voltage ratings between 3V and 30V. It features a 5V output interface that provides power for 5V single-chip circuitry and supports 3.3V...