
Constant-speed-motor-driver
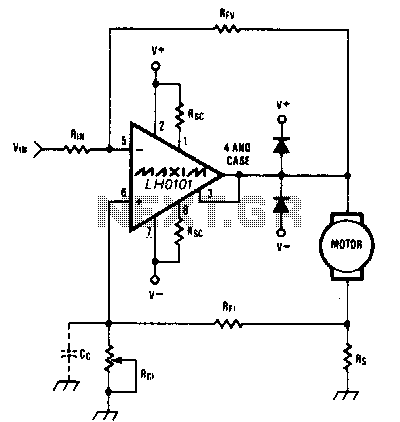
When the torque load on the motor increases, its current also rises. This increase in current is detected across Rs, and positive feedback is applied to the noninverting terminal of the LH0101, which in turn raises the motor voltage to counterbalance the increased torque load. With the appropriate level of positive feedback, the variation in motor speed can be maintained within 1% of the nominal value from no load to full load.
The described circuit utilizes a current sensing resistor (Rs) to monitor the current flowing through the motor. As the torque load on the motor increases, the current through Rs increases proportionally. This change in current is crucial as it informs the control circuit of the motor's operational status. The LH0101 operational amplifier is employed to amplify the sensed current signal.
The configuration of the LH0101 is such that it receives the sensed voltage across Rs at its noninverting terminal. The output of the operational amplifier is then fed back to the motor driver circuit, adjusting the voltage supplied to the motor accordingly. This feedback loop is essential for maintaining consistent motor performance under varying load conditions.
The positive feedback mechanism is finely tuned to ensure that the motor speed remains stable, allowing for a variation of no more than 1% from no load to full load. This level of precision is critical in applications where motor speed consistency is vital. The circuit's design must consider factors such as the gain of the LH0101, the value of Rs, and the characteristics of the motor to achieve the desired performance.
In summary, the circuit effectively regulates motor speed by utilizing current sensing and feedback control, ensuring reliable operation across a range of load conditions. This approach is particularly beneficial in applications requiring precise motor control and performance stability.When the torque load on the motor increases, its current increases. This current increase is sensed across Rs, and positive feedback is applied to the noninverting terminal of the LH0101, thereby increasing the motor voltage to compensate for the increased torque load. With the proper amount of positive feedback, the motor-speed variation can be kept below 1 o/a from no load to full load. 🔗 External reference
The described circuit utilizes a current sensing resistor (Rs) to monitor the current flowing through the motor. As the torque load on the motor increases, the current through Rs increases proportionally. This change in current is crucial as it informs the control circuit of the motor's operational status. The LH0101 operational amplifier is employed to amplify the sensed current signal.
The configuration of the LH0101 is such that it receives the sensed voltage across Rs at its noninverting terminal. The output of the operational amplifier is then fed back to the motor driver circuit, adjusting the voltage supplied to the motor accordingly. This feedback loop is essential for maintaining consistent motor performance under varying load conditions.
The positive feedback mechanism is finely tuned to ensure that the motor speed remains stable, allowing for a variation of no more than 1% from no load to full load. This level of precision is critical in applications where motor speed consistency is vital. The circuit's design must consider factors such as the gain of the LH0101, the value of Rs, and the characteristics of the motor to achieve the desired performance.
In summary, the circuit effectively regulates motor speed by utilizing current sensing and feedback control, ensuring reliable operation across a range of load conditions. This approach is particularly beneficial in applications requiring precise motor control and performance stability.When the torque load on the motor increases, its current increases. This current increase is sensed across Rs, and positive feedback is applied to the noninverting terminal of the LH0101, thereby increasing the motor voltage to compensate for the increased torque load. With the proper amount of positive feedback, the motor-speed variation can be kept below 1 o/a from no load to full load. 🔗 External reference