
knexapod
K'nexapod is a hexapod robot constructed using K'nex building toys and managed by a PICAXE microcontroller. It is powered by small hobby servos, allowing it to move forward, backward, and turn. The robot features an ultrasonic sensor and operates based on a straightforward algorithm that enables it to navigate while avoiding obstacles.
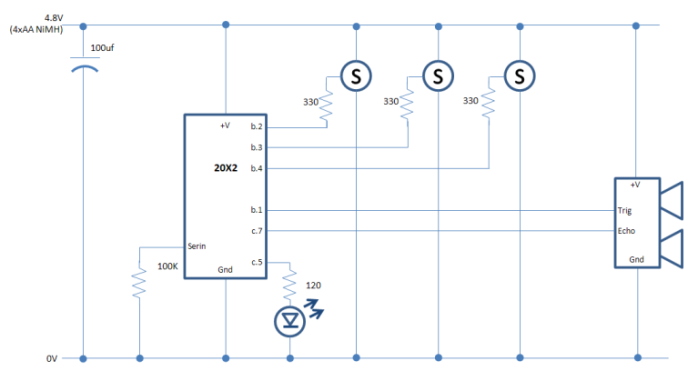
The K'nexapod hexapod robot utilizes a combination of K'nex structural components and a PICAXE microcontroller to facilitate its movement and control. The design incorporates six legs, each driven by a small hobby servo motor, which provides the necessary propulsion for locomotion. This configuration allows the robot to perform complex movements, including forward and backward motion, as well as turning maneuvers.
The ultrasonic sensor plays a crucial role in the robot's navigation capabilities. By emitting ultrasonic waves and measuring the time it takes for the echoes to return, the sensor can detect the presence of obstacles within its vicinity. The data collected by the ultrasonic sensor is processed by the PICAXE microcontroller, which executes a simple algorithm designed to enable the robot to avoid collisions. This algorithm typically involves determining the distance to the nearest obstacle and adjusting the robot's movement accordingly, allowing it to change direction or stop when an obstacle is detected.
The overall design of the K'nexapod emphasizes modularity and ease of assembly, making it accessible for hobbyists and educational purposes. The use of K'nex building toys allows for a high degree of customization, enabling users to modify the robot's structure or functionality as desired. The integration of the PICAXE microcontroller and ultrasonic sensor not only enhances the robot's capabilities but also serves as an excellent platform for learning about robotics, programming, and sensor integration.K`nexapod is a hexapod robot built with K`nex building toys and controlled by a PICAXE microntroller. Propelled by small hobby servos it can move forward, backward, and make turns. It is equipped with an ultrasonic sensor and follows a simple algorithm to wander about while avoiding obstacles in its path..
🔗 External reference
The K'nexapod hexapod robot utilizes a combination of K'nex structural components and a PICAXE microcontroller to facilitate its movement and control. The design incorporates six legs, each driven by a small hobby servo motor, which provides the necessary propulsion for locomotion. This configuration allows the robot to perform complex movements, including forward and backward motion, as well as turning maneuvers.
The ultrasonic sensor plays a crucial role in the robot's navigation capabilities. By emitting ultrasonic waves and measuring the time it takes for the echoes to return, the sensor can detect the presence of obstacles within its vicinity. The data collected by the ultrasonic sensor is processed by the PICAXE microcontroller, which executes a simple algorithm designed to enable the robot to avoid collisions. This algorithm typically involves determining the distance to the nearest obstacle and adjusting the robot's movement accordingly, allowing it to change direction or stop when an obstacle is detected.
The overall design of the K'nexapod emphasizes modularity and ease of assembly, making it accessible for hobbyists and educational purposes. The use of K'nex building toys allows for a high degree of customization, enabling users to modify the robot's structure or functionality as desired. The integration of the PICAXE microcontroller and ultrasonic sensor not only enhances the robot's capabilities but also serves as an excellent platform for learning about robotics, programming, and sensor integration.K`nexapod is a hexapod robot built with K`nex building toys and controlled by a PICAXE microntroller. Propelled by small hobby servos it can move forward, backward, and make turns. It is equipped with an ultrasonic sensor and follows a simple algorithm to wander about while avoiding obstacles in its path..
🔗 External reference