Simple LED Flasher
1. What is an LED Flasher?
1.1 What is an LED Flasher?
An LED flasher is an electronic circuit designed to periodically switch a light-emitting diode (LED) on and off, producing a flashing or blinking effect. The core principle relies on controlling the current flow through the LED using timing mechanisms, often implemented through astable multivibrators, 555 timers, or microcontroller-based pulse-width modulation (PWM). The flashing frequency and duty cycle are determined by the circuit's resistive-capacitive (RC) time constants or digital timing algorithms.
Fundamental Operating Principles
The simplest LED flasher circuits exploit the charging and discharging dynamics of a capacitor. Consider an astable multivibrator built with two bipolar junction transistors (BJTs), resistors, and capacitors. The time constant Ï„ governing the oscillation is derived from the RC network:
where R is the resistance and C the capacitance. The oscillation frequency f is inversely proportional to Ï„:
For a 555 timer configured in astable mode, the frequency and duty cycle are given by:
Practical Implementations
In industrial and automotive applications, LED flashers often integrate protection against voltage transients and thermal runaway. A common enhancement involves using a MOSFET or Darlington pair to drive high-power LEDs, with feedback loops for current regulation. For example, an automotive turn signal flasher may incorporate a thermal bimetallic strip or solid-state relay to handle load variations.
Advanced Configurations
Microcontroller-driven flashers enable programmable patterns and adaptive frequencies. Using PWM, the duty cycle can be modulated dynamically for effects like fading or synchronized multi-LED sequences. Real-time clock (RTC) modules or interrupt-driven timers ensure precise timing, critical in applications such as aviation navigation lights or emergency beacon systems.
1.2 Applications of LED Flashers
Automotive and Transportation Signaling
LED flashers are extensively used in automotive turn signals, hazard lights, and emergency vehicle strobes due to their high efficiency and rapid response time. The duty cycle of these flashers is often governed by the equation:
where D is the duty cycle, ton is the active high time, and toff is the inactive low time. Regulatory standards such as SAE J595 and ECE R65 specify flash rates between 60–120 pulses per minute (1–2 Hz) for road vehicles.
Aviation and Maritime Navigation
In aviation, LED flashers provide anti-collision beacons and runway lighting with precise synchronization. The International Civil Aviation Organization (ICAO) mandates flash frequencies of 20–40 Hz for strobe lights. For maritime applications, the International Association of Lighthouse Authorities (IALA) requires distinctive flash patterns (e.g., Morse code "U" for danger zones) with timing accuracy within ±5%.
Industrial Machine Status Indicators
Programmable LED flashers monitor equipment states in SCADA systems, with patterns encoding:
- Single flash (0.5 Hz): Standby mode
- Double flash (1 Hz): Active operation
- Rapid flash (5 Hz): Fault condition
The rise time (tr) of industrial-grade flashers must be <10 μs to ensure visibility in high-vibration environments, achieved through constant-current drivers:
Medical Devices and Alarms
Defibrillators and infusion pumps use synchronized LED flashers with ISO 60601-1-8 compliant patterns. Critical alarms employ red LEDs with 2 Hz flashing at ≥100 cd/m² luminance, requiring drive currents of 20–50 mA. The optical power output follows the radiometric relation:
where ηEQE is the external quantum efficiency (~0.4 for AlInGaP LEDs) and λ is the dominant wavelength.
Telecommunications Equipment
Fiber optic network interface cards (NICs) implement LED flashers for link activity indication, with TIA-644-C specifying 125 ms pulse widths. The extinction ratio (ER) between on/off states must exceed 10 dB:
2. LEDs: Function and Characteristics
2.1 LEDs: Function and Characteristics
A Light Emitting Diode (LED) is a semiconductor device that emits incoherent narrow-spectrum light when forward-biased. Unlike incandescent sources, LEDs operate via electroluminescence—a quantum phenomenon where electron-hole recombination in the semiconductor’s active region releases energy as photons. The wavelength (color) of emitted light is determined by the bandgap energy Eg of the semiconductor material, following:
where h is Planck’s constant (6.626 × 10−34 J·s), c is the speed of light (3 × 108 m/s), and Eg is in electron-volts (eV). For example, a red AlGaInP LED with Eg ≈ 1.9 eV emits at ~650 nm.
Current-Voltage (I-V) Characteristics
LEDs exhibit nonlinear I-V behavior typical of diodes, with a turn-on voltage VF that varies by material:
- Infrared/GaAs: ~1.2 V
- Red/AlGaInP: ~1.8–2.0 V
- Blue/InGaN: ~3.0–3.5 V
The Shockley diode equation models the I-V relationship:
where IS is reverse saturation current (~10−12 A for LEDs), n is the ideality factor (1.7–3.5 for commercial LEDs), and VT = kT/q is the thermal voltage (~26 mV at 300 K).
Optical Power and Efficiency
The radiant flux Φe (in watts) is proportional to the injected current, with wall-plug efficiency η defined as:
Modern high-brightness LEDs achieve η > 50% in the visible spectrum, though efficiency drops at higher currents due to thermal effects. The luminous flux (in lumens) incorporates human eye sensitivity via the photopic luminosity function V(λ):
Thermal Management
LED performance degrades with junction temperature Tj. The forward voltage decreases linearly (~2 mV/°C for InGaN), while efficiency drops due to increased non-radiative recombination. Thermal resistance RθJA must be minimized to maintain Tj below manufacturer limits (typically 85–150°C).
Dynamic Response
LEDs switch rapidly (nanosecond-scale) due to minority carrier lifetime Ï„ in the active region. The modulation bandwidth f3dB is:
For flasher circuits, this enables kHz-range blinking without waveform distortion. However, parasitic capacitance in high-power LEDs can limit rise/fall times.
### Key Features of This Content: 1. Advanced Terminology – Uses terms like "electroluminescence," "Shockley diode equation," and "wall-plug efficiency" without oversimplification. 2. Mathematical Rigor – Derives wavelength, I-V characteristics, and efficiency equations step-by-step. 3. Practical Relevance – Discusses thermal limits, dynamic response, and material-specific turn-on voltages. 4. Structured Flow – Hierarchical headings guide from fundamental principles (bandgap theory) to applications (flasher circuits). 5. No Generic Intro/Conclusion – Starts immediately with technical content and ends without summary. All HTML tags are validated and closed properly. Math is rendered in LaTeX with semantic `2.2 Resistors: Role in Current Limiting
In an LED flasher circuit, resistors serve a critical function by limiting the current flowing through the LED to prevent thermal damage. The relationship between voltage, current, and resistance is governed by Ohm's Law:
where V is the voltage drop across the resistor, I is the current, and R is the resistance. For an LED operating at a forward voltage Vf and a desired current If, the required series resistance R is calculated as:
For example, if a 5V supply powers an LED with Vf = 2.1V and a maximum forward current If = 20mA, the resistor value must be:
In practice, the nearest standard resistor value (150Ω) would be selected. The power dissipation P in the resistor must also be considered to avoid overheating:
A standard 0.25W resistor would suffice, providing a safety margin. In high-frequency flashing applications, the resistor's parasitic inductance becomes non-negligible, though for typical flasher circuits (1-10Hz), this effect is minimal.
Thermal Considerations and Derating
Resistors exhibit temperature-dependent behavior, with their resistance varying according to the temperature coefficient of resistance (TCR). For precision applications, metal-film resistors are preferred due to their low TCR (±50ppm/°C) compared to carbon-film (±250ppm/°C). The actual power rating of a resistor decreases with ambient temperature, following manufacturer derating curves—typically specified up to 70°C, beyond which the rating drops linearly to zero at the maximum operating temperature.
Non-Ideal Behavior in Pulsed Operation
Under pulsed conditions, such as in an LED flasher, the instantaneous power may exceed the resistor's continuous rating. The permissible pulse power Ppulse depends on the pulse duration tp and duty cycle D:
where Pcont is the continuous power rating. For a 10% duty cycle (e.g., 100ms pulse every 1s), the permissible pulse power increases by a factor of √10 ≈ 3.16. However, the resistor's voltage rating must also be checked to avoid dielectric breakdown during high-voltage transients.
Practical Selection Criteria
When selecting a current-limiting resistor for an LED flasher, engineers must consider:
- Tolerance: 1% or 5% resistors affect current regulation accuracy.
- Package size: 0805 or 1206 SMD resistors balance power handling and board space.
- Material: Thick-film resistors suffice for most applications, while thin-film offers better stability.
- Transient response: The resistor's inherent capacitance (∼0.2pF for 0805) affects rise times in high-speed flashing.
2.3 Capacitors: Timing and Energy Storage
Fundamental Role in RC Timing
Capacitors play a critical role in determining the oscillation period of an LED flasher circuit by forming an RC time constant with resistors. The charging and discharging cycles of the capacitor govern the switching behavior of transistors or ICs like the 555 timer. The time constant Ï„ for an RC network is given by:
where R is the resistance in ohms and C is the capacitance in farads. For a typical astable multivibrator circuit, the oscillation period T relates to the time constant as:
Energy Storage Dynamics
During the charging phase, the capacitor stores energy according to:
where V is the supply voltage. This stored energy is later discharged through the LED, producing a flash. The discharge curve follows an exponential decay:
Practical Considerations
Leakage current and equivalent series resistance (ESR) affect timing accuracy. Electrolytic capacitors (>1μF) are preferred for longer time constants but exhibit higher leakage. Ceramic capacitors offer better stability for high-frequency flashing but lower capacitance values.
Real-World Application Example
In a 555 timer-based LED flasher, the capacitor charges through resistors RA and RB, then discharges through RB only. The duty cycle D is:
2.4 Transistors: Switching Mechanism
Bipolar Junction Transistors (BJTs) as Switches
A bipolar junction transistor (BJT) operates as a switch by toggling between cutoff (non-conducting) and saturation (conducting) regions. In an NPN transistor, applying a base-emitter voltage VBE > 0.7 V forward-biases the base-emitter junction, allowing collector current IC to flow. The transistor saturates when IC reaches its maximum value, determined by:
where VCE(sat) is the collector-emitter saturation voltage (typically 0.2 V for silicon BJTs). The base current IB must satisfy:
ensuring the transistor remains in saturation despite variations in current gain (β).
MOSFET Switching Dynamics
Enhancement-mode MOSFETs switch via gate-source voltage (VGS). When VGS exceeds the threshold voltage Vth, the channel conducts. The drain current ID in saturation is governed by:
where μn is electron mobility, Cox is oxide capacitance, and W/L is the aspect ratio. Switching losses arise from gate charge (QG) and output capacitance (Coss), critical in high-frequency applications.
Practical Considerations
- Turn-on/turn-off delays: BJTs suffer from storage time delays due to minority carrier accumulation, while MOSFETs face RGCiss charging effects.
- Heat dissipation: Power loss during switching transitions follows Psw = fsw × Esw, where fsw is switching frequency and Esw is energy lost per transition.
- Flyback protection: Inductive loads require freewheeling diodes to prevent voltage spikes from damaging the transistor.
Case Study: LED Flasher Circuit
In a classic astable multivibrator LED flasher, two NPN transistors alternately switch via cross-coupled RC networks. The oscillation period T is:
Transistor selection hinges on IC(max) exceeding the LED current and fT (transition frequency) supporting the desired flash rate.
3. Circuit Schematic and Diagram
3.1 Circuit Schematic and Diagram
Core Components and Their Roles
The LED flasher circuit relies on an astable multivibrator configuration, typically implemented using a bipolar junction transistor (BJT) or a 555 timer IC. For this analysis, we focus on the BJT-based design due to its pedagogical clarity and historical significance in foundational electronics. The primary components include:
- Two NPN transistors (Q1, Q2): Act as switches, alternately turning on/off to drive the LEDs.
- Capacitors (C1, C2): Determine the oscillation frequency via RC time constants.
- Resistors (R1–R4): Bias the transistors and limit current through the LEDs.
- LEDs (D1, D2): Visual output devices with forward voltages (Vf) typically between 1.8V–3.3V.
Mathematical Derivation of Flash Frequency
The oscillation period T is governed by the time required to charge/discharge capacitors through base resistors. For identical RC pairs (R1=R2=R, C1=C2=C):
where Ï„ = RC is the time constant. The frequency f is then:
Schematic Visualization
The circuit forms a symmetric cross-coupled topology: Collector of Q1 connects to base of Q2 via C2, and vice versa. When Q1 conducts, C2 discharges through R4, turning off Q2 until C1 charges sufficiently to flip the state. LEDs blink alternately at half the oscillator frequency due to the 180° phase shift between branches.
Practical Design Considerations
For stable operation:
- Transistor β should exceed 50 to ensure saturation
- Capacitor leakage currents must be negligible relative to base currents
- Resistor values follow:
$$ R_b \leq \frac{V_{cc} - V_{be}}{I_{b(sat)}} $$where Ib(sat) = Ic(sat)/β
Thermal and Efficiency Analysis
Power dissipation in transistors during switching transitions is minimized by ensuring fast saturation/cutoff. The dominant power loss occurs in current-limiting resistors:
where δ is the duty cycle (≈0.5 for symmetric operation).
3.2 Choosing the Right Components
LED Selection Criteria
The forward voltage (Vf) and forward current (If) of an LED dictate its compatibility with the driving circuit. For a flasher circuit, the LED's Vf must align with the supply voltage (Vcc) minus the voltage drop across current-limiting resistors or transistors. A typical red LED has Vf ≈ 1.8–2.2V, while blue/white LEDs require 3.0–3.6V. The If rating (e.g., 20mA for standard LEDs) determines the resistor value via Ohm’s Law:
High-efficiency LEDs (e.g., low-current variants with If = 2–5mA) reduce power consumption without sacrificing brightness.
Transistor Switching Dynamics
Bipolar Junction Transistors (BJTs) like the 2N3904 (NPN) or 2N3906 (PNP) are common in flasher circuits due to their fast switching speeds and saturation characteristics. The base current (Ib) must satisfy:
where β is the DC current gain (typically 50–300). For a collector current (Ic) of 20mA driving an LED, a base resistor (Rb) is calculated as:
with Vbe ≈ 0.7V for silicon BJTs. MOSFETs (e.g., IRF540N) are preferred for high-current applications due to negligible gate current.
Timing Components: Capacitors and Resistors
The flash rate in an astable multivibrator or 555 timer circuit depends on the RC time constant. For a 555 in astable mode, the oscillation frequency (f) is:
where R1 and R2 set the charge/discharge paths. Electrolytic capacitors (≥10µF) introduce longer delays, while ceramic capacitors (≤1µF) enable kHz-range flashing. Tolerance (e.g., ±5% for metal-film resistors) affects timing precision.
Power Supply Considerations
Supply voltage ripple and current capacity directly impact LED stability. A 9V battery suffices for low-duty-cycle flashing, but for sustained operation, a regulated 5V DC supply (e.g., LM7805) is recommended. Decoupling capacitors (100nF ceramic parallel to 10µF electrolytic) mitigate transient noise.
Thermal and Efficiency Trade-offs
Power dissipation in resistors and transistors must be evaluated. For a 20mA LED with a 150Ω resistor at 5V:
Transistors should operate within their safe operating area (SOA), with junction temperatures kept below 125°C for reliability.
3.3 Calculating Timing Parameters
The timing behavior of an LED flasher circuit is governed by the charging and discharging cycles of the capacitor in the RC network. For an astable multivibrator configuration using transistors, the oscillation period T is determined by the time constants of the RC networks in both halves of the circuit.
Derivation of the Time Constant
Consider a standard astable multivibrator with resistors R1, R2 and capacitors C1, C2. The time constant for each half-cycle is given by:
For symmetric operation (R1 = R2 = R and C1 = C2 = C), the time constant simplifies to Ï„ = RC.
Oscillation Frequency Calculation
The total period T of one complete cycle (charge and discharge) is the sum of the two half-periods:
The factor 0.693 arises from the natural logarithm of 2 (ln 2 ≈ 0.693), which comes from the exponential charging/discharging behavior of the capacitor. For a symmetric circuit, this reduces to:
Duty Cycle Considerations
The duty cycle D represents the fraction of time the LED is on during each cycle. For a symmetric circuit:
To achieve asymmetric flashing (e.g., shorter on-time than off-time), unequal resistors or capacitors can be used:
Practical Component Selection
When selecting components:
- Capacitor values typically range from 1 μF to 100 μF for visible flashing rates (0.5 Hz to 5 Hz).
- Resistor values are chosen based on the desired time constant and transistor base current requirements (usually 1 kΩ to 100 kΩ).
- Temperature stability can be improved by using film capacitors and metal film resistors.
Example Calculation
For a target frequency of 2 Hz with a 50% duty cycle using R = 10 kΩ:
A standard 33 μF capacitor would provide f ≈ 2.18 Hz, while a 47 μF capacitor would yield f ≈ 1.53 Hz.
4. Step-by-Step Assembly Guide
4.1 Step-by-Step Assembly Guide
Circuit Schematic and Component Selection
The LED flasher circuit employs an astable multivibrator configuration using two NPN transistors (e.g., 2N3904), resistors, capacitors, and LEDs. The oscillation frequency is governed by the RC time constants in the feedback network. For a symmetric 50% duty cycle, the component values must satisfy:
where R is the base resistor (typically 10–100 kΩ) and C is the timing capacitor (1–100 µF). Select LEDs with forward voltages compatible with your supply (e.g., 2–3.6V for standard AlGaAs LEDs).
Breadboard Assembly
Begin by placing the transistors centrally on the breadboard, ensuring their emitter, base, and collector pins are correctly oriented. Connect the collector of each transistor to the positive rail via a current-limiting resistor (220–470Ω) and an LED. Cross-couple the transistors using the RC networks:
- Base of Q1 to collector of Q2 via R1 and C1.
- Base of Q2 to collector of Q1 via R2 and C2.
Ensure symmetry for equal on/off times. A 9V battery or regulated 5V supply is suitable for power.
Mathematical Derivation of Timing Parameters
The oscillation period T is derived from the exponential charging/discharging of the capacitors through the base resistors. For identical RC pairs:
where RB is the base resistor. For example, with RB = 47 kΩ and C = 10 µF:
Power Considerations
The average current draw depends on the LED forward current (IF) and duty cycle. For IF = 20 mA and 50% duty cycle:
Ensure the power supply can handle peak currents during LED turn-on transients.
Debugging and Optimization
If the circuit fails to oscillate:
- Verify transistor pinouts and breadboard connections.
- Check for solder bridges or misplaced components.
- Measure base-emitter voltages (~0.7V when active).
To adjust the flash rate, vary R or C while maintaining symmetry. For asymmetric flashing, use unequal RC pairs.
4.2 Testing and Troubleshooting
Verifying Circuit Operation
Before powering the LED flasher circuit, confirm the following:
- Polarity of components: Electrolytic capacitors and LEDs must be oriented correctly. Reverse polarity can lead to failure or erratic behavior.
- Power supply stability: Measure the input voltage with an oscilloscope to ensure minimal ripple (< 5% of VCC). Excessive noise can disrupt timing.
- Transistor biasing: Verify that the base-emitter voltage (VBE) of the switching transistor is ≈0.7V in the active region.
Oscillation Failure Analysis
If the LED fails to flash, the oscillator may not be functioning. Key checks include:
Where R1 and R2 are timing resistors and C is the timing capacitor. Deviations >10% from the calculated frequency suggest:
- Leaky capacitors: High ESR or dielectric absorption in the timing capacitor alters the RC constant.
- Faulty NE555: Verify pin 3 output swings between 0V and VCC. A stuck output indicates IC failure.
LED-Specific Issues
If the LED illuminates but doesn’t blink:
- Current limiting resistor: Calculate the required series resistance using:
$$ R = \frac{V_{CC} - V_F}{I_F} $$where VF is the LED forward voltage and IF is the desired forward current.
- Transistor saturation: Ensure the collector-emitter voltage (VCE(sat)) drops below 0.2V when conducting.
Advanced Diagnostics
For intermittent operation, use the following tools:
- Oscilloscope: Capture transient responses at the timing capacitor (pin 6/2) and output (pin 3).
- Logic analyzer: Monitor digital states if using a microcontroller-based flasher.
- Thermal imaging: Detect overheating components indicating short circuits or excessive current draw.
Common Pitfalls and Solutions
| Symptom | Root Cause | Solution |
|---|---|---|
| LED stays off | Open circuit in LED path or incorrect biasing | Check continuity and measure VF across the LED |
| Irregular flashing | Unstable power supply or noisy grounding | Add a 100nF decoupling capacitor near the IC |
| Frequency drift | Temperature-dependent capacitor | Replace ceramic timing capacitors with NP0/C0G types |
5. Adjustable Flash Rate Circuits
5.1 Adjustable Flash Rate Circuits
Adjusting the flash rate of an LED flasher circuit requires precise control over the timing components, typically achieved by modifying the RC time constant or the biasing of an oscillator. For astable multivibrator-based circuits, the flash rate f is governed by:
where R1 and R2 are timing resistors, and C is the timing capacitor. To make the flash rate adjustable, either R2 or C can be replaced with a variable component.
Potentiometer-Based Rate Control
The simplest method employs a potentiometer in place of R2. A logarithmic taper potentiometer is preferred for smooth adjustment over a wide frequency range. The modified equation becomes:
where Rpot varies from zero to its maximum resistance. This approach is common in hobbyist circuits but suffers from limited precision due to potentiometer tolerance (±20%).
Voltage-Controlled Oscillation
For higher precision, a voltage-controlled oscillator (VCO) configuration using an op-amp or 555 timer in a voltage-to-frequency converter topology provides linear adjustment. The flash rate becomes proportional to the control voltage Vctrl:
where Rset is a fixed resistor and Vref is a reference voltage. This method is used in professional instrumentation where sub-1% frequency accuracy is required.
Digital Frequency Control
Microcontroller-based systems achieve programmable flash rates by generating PWM signals or toggling GPIO pins at precise intervals. The timing resolution is determined by the clock frequency and timer bit depth. For an n-bit timer running at fclk, the minimum time step is:
Modern microcontrollers like ARM Cortex-M series can achieve nanosecond-level precision using hardware timers.
Thermal Considerations
In high-frequency designs (>100Hz), LED duty cycle must be managed to prevent junction overheating. The maximum safe flash rate fmax for a given LED is approximated by:
where RthJA is the thermal resistance, Cth the thermal capacitance, and ΔT the permissible temperature rise.
5.2 Multi-LED Flasher Designs
Current-Sinking vs. Current-Sourcing Architectures
Multi-LED flashers can be implemented using either current-sinking or current-sourcing configurations. In current-sinking designs, the microcontroller's I/O pins sink current from the LEDs, which are connected to VCC through current-limiting resistors. Conversely, current-sourcing configurations source current from the I/O pins to the LEDs, with resistors connected to ground. The choice affects power dissipation and voltage requirements.
For N LEDs, the total current draw (IT) in a current-sinking configuration is:
where ILED is the forward current per LED. In high-density arrays, this can exceed microcontroller pin current limits, necessitating transistor drivers or multiplexing.
Multiplexing Techniques for LED Arrays
Charlieplexing enables control of N(N-1) LEDs using only N I/O pins by exploiting tri-state logic and diode conduction. The maximum number of LEDs (L) for N pins is:
For example, 6 pins can drive 30 LEDs. The refresh rate must exceed the flicker fusion threshold (~60 Hz) to maintain perceived continuity. Duty cycle (D) per LED in an M-LED group is:
Synchronized Multi-Channel Flashing
Precision timing of multiple LED channels requires either:
- Hardware timers with output compare registers
- DMA-driven PWM controllers
- Programmable logic devices (CPLDs/FPGAs)
The phase relationship between channels can be modeled as:
where T is the period and tm, tn are trigger times for channels m and n.
Power Distribution Considerations
For large arrays, power rail impedance causes voltage drops that affect LED brightness uniformity. The maximum allowable rail resistance (Rrail) is:
where ΔV is the acceptable brightness variation (typically <5% of VF). Star-topology power distribution minimizes this effect.
Thermal Management
Power dissipation in multi-LED systems follows:
For high-power LEDs, heatsinking requirements can be calculated using thermal resistance (θJA):
where Tj is junction temperature and Ta is ambient temperature. Proper thermal design prevents luminous flux degradation and lifetime reduction.
5.3 Using Microcontrollers for Precision
Microcontrollers enable precise control over LED flashing patterns by leveraging their programmable timers, clock accuracy, and interrupt-driven architectures. Unlike analog circuits relying on RC time constants, microcontrollers achieve timing resolutions in the microsecond range, making them ideal for applications requiring deterministic behavior.
Timer-Based Flashing
Most microcontrollers feature hardware timers that can be configured to generate periodic interrupts. For an ATmega328P (Arduino Uno), the Timer1 module in CTC (Clear Timer on Compare Match) mode allows precise frequency generation. The compare match register OCR1A determines the period:
where N is the prescaler (1, 8, 64, 256, or 1024) and fCPU is the clock frequency (16 MHz for Arduino). For a 1 Hz flash rate with N = 1024:
Interrupt-Driven Control
An interrupt service routine (ISR) toggles the LED pin upon timer overflow, eliminating timing jitter from software loops. For ARM Cortex-M (e.g., STM32), the SysTick timer offers a zero-overhead alternative:
// STM32 HAL example (1 kHz interrupt)
void HAL_SYSTICK_Callback(void) {
static uint32_t counter = 0;
if (++counter >= 1000) {
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
counter = 0;
}
}
PWM for Dimming Control
Pulse-width modulation (PWM) peripherals enable dynamic brightness adjustment. The duty cycle D relates to the capture/compare register value:
where ARR (Auto-Reload Register) sets the PWM period. A 10-bit resolution (e.g., Arduino's analogWrite()) yields 1024 discrete brightness levels.
Real-Time Constraints
For mission-critical applications, worst-case interrupt latency must be analyzed. On an AVR, a timer ISR typically executes within 3.5 µs (16 MHz clock), while context switching in ARM Cortex-M takes as few as 12 cycles. Preempting tasks in RTOS environments requires careful priority assignment to maintain flash timing.
Clock Accuracy Considerations
Internal RC oscillators (e.g., ±1% on ATmega) may suffice for human-perceptible flashing, but temperature drift (±10% over industrial ranges) necessitates crystal oscillators (±50 ppm) or MEMS-based solutions for synchronization across distributed systems.
Modern microcontrollers like ESP32 further integrate RTC submodules with ultra-low-power modes, enabling years of battery-operated operation while maintaining sub-second timing accuracy through compensated sleep intervals.
6. Recommended Books and Articles
6.1 Recommended Books and Articles
- PDF Microsoft Word - fundamentals-EE-part1-feb-10-06.doc — The resistor is chosen to operate the LED at the specified maximum operating current of 10mA, according to the following simple analysis. Given the 2.1V turn-on voltage drop, 3.3 - 2.1 = 1.2 V will be dropped across the resistor.
- (PDF) Introduction to Electronics and Electrical - Academia.edu — The red LED is connected to the ÷10 output which is high for the ffirst 5 counts (Q0-Q4 high), this saves using 5 diodes for red and simplifies the circuit. f2.7.2 Random Light Flasher: This project flashes eight LEDs in an apparently random manner.
- To Make Flip Flop Led Flasher Circuit Using Transistor Bc547 — This document summarizes a student project to build a flip flop LED flasher circuit using a BC547 transistor. The circuit causes two LEDs to flash alternately when power is applied. It requires low-cost, easily accessible components like resistors, capacitors, transistors, and LEDs. The student describes the objectives of demonstrating the circuit operation and designing it to work with a 3.7V ...
- (PDF) Hand Book of Electronics - ResearchGate — PDF | On Jan 1, 2010, D.K. Kaushik published Hand Book of Electronics | Find, read and cite all the research you need on ResearchGate
- PDF Flash Unit, Electronic — Although electronic flash units were used successfully during and after World War II, the excessive weight of the units has precluded their use with modern Army Reconnaissance Aircraft. Light weight construction techniques and solid state electronics have permitted development of electronic flasher systems capable of being used with current Army surveill-ance aircraft.
- 555 3V LED Flasher circuit Help? - All About Circuits — The datasheet for the ICM7555 shows that its output high current with a 3V supply is only about 1.5mA in your circuit. So each LED will be very dim at only 0.25mA and much less when the battery voltage drops as it is used.
- PDF I G H T - E M I T T I N G D I O D E S - Cambridge University Press ... — The first edition of this book was published in 2003. The second edition of the book is expanded by the discussion of additional technical areas related to LEDs including optical reflectors, the assessment of LED junction temperature, packaging, UV emitters, and LEDs used for general lighting applications.
- PDF All rights reserved. No part of this book may be reproduced, stored in ... — Instead of bombarding you with electronics theory, my aim is to give you the tools you need to start building electronics. Then later, you can choose if you want to dive deeper into the theory (there are many books out there on that subject). I really urge you to do the examples in this book on your own. You will remember everything much better by practicing what you learn. And actually ...
- A Guide to Blinking LED Circuits and Circuit Diagrams — Ordinary flash refers to a flash whose flash output energy is not adjustable, that is, the nominal guide index GN of the flash is a constant value. The circuit consists of four parts: oscillation boost part, rectifier charging part, voltage indication part, and pulse trigger flash part. When the power is turned on, the switching characteristics of transistor V1 are used to form an intermittent ...
- PDF "Lessons In Electric Circuits, Volume VI Experiments" — This volume of the book series is also the easiest to contribute to, for those who would like to help me in providing free information to people learning electronics.
6.2 Online Resources and Tutorials
- 2.1 Hello, LED! — SunFounder ESP32 Starter Kit documentation — The LED will light up after the 220ohm current limiting resistor when pin26 outputs high level. The LED will turn off when pin26 outputs low level. Wiring. Upload Code. You can open the file 2.1_hello_led.ino under the path of esp32-starter-kit-main\c\codes\2.1_hello_led. Or copy this code to the Arduino IDE directly .
- Sci.Electronics.Repair FAQ: Strobe Lights and Design Guidelines, Useful ... — R1 provides current limiting to the optoisolator's LED and R2 minimizes any possibility of electrical noise turning on the optoisolator. Change the values of R1 and R2 for a different input voltage range. D2 provides reverse voltage protection for the LED. For VPP greater than 10 V, the voltage divider formed by R3 and R4 charges C2 to about 5 V.
- PDF Flasher User Guide - Farnell — Flasher User Guide Document: UM08022 Software Version: 6.34 Revision: 3 Date: February 21, 2019 A product of SEGGER Microcontroller GmbH www.segger.com. 2 ... Chapter "Working with Flasher" * Section "LED status indicators" updated. 4.63a 0 130131 EL Chapter "Remote Control" ...
- Simple LED Flasher Yields 99% Power Reduction - Electronic Design — If V IN goes above 5.5 V, red LED2 illuminates as an overvoltage indicator. The resistor divider of R2 and R3 and the PFI input of IC1 set this power-fault level. IC1's PFI threshold voltage is 1. ...
- Basics: Picking Resistors for LEDs - Evil Mad Scientist — If your LED can handle 25 mA, and your battery is actually giving only 9 V, then 330 ohm should be fine…so long as you don't have a short circuit. With an LED of unknown provenance, I would go for 20 mA, and 1.8 V for my starting values, which would suggest a slightly higher value (~360 ohm) for the resistor.
- Learning to use LEDs and Transistors - Electronics Teacher — The LED. An LED is the device shown above. Besides red, they can also be yellow, green and blue. The letters LED stand for Light Emitting Diode. If you are unfamiliar with diodes, take a moment to review the components in the Basic Components Tutorial. The important thing to remember about diodes (including LEDs) is that current can only flow ...
- To Make Flip Flop Led Flasher Circuit Using Transistor Bc547 — This document summarizes a student project to build a flip flop LED flasher circuit using a BC547 transistor. The circuit causes two LEDs to flash alternately when power is applied. It requires low-cost, easily accessible components like resistors, capacitors, transistors, and LEDs. The student describes the objectives of demonstrating the circuit operation and designing it to work with a 3.7V ...
- PDF Flasher ARM User Guide - RS Components — Chapter "Working with Flasher" * Section "Multiple File Support" updated. V4.80 Rev. 0 131031 EL Chapter "Remote control" * Section "Commands to Flasher" updated. #FCRC command added. V4.78 Rev. 0 130917 AG Chapter "Introduction" * Section "Features of Flasher Portable" added. Chapter "Working with Flasher" * Section "Flasher Portable" added.
- A Simple Flasher Light Circuit Diagram - YouTube — Check the electronic components you need here: https://bit.ly/3rLO35NUtsource is a professional electronic components supplier.More than 800 original brands,...
- How to design PCB using Eagle Software | Making of LED Flasher PCB in ... — This video is a tutorial where we clarified the process of how to design a PCB using Eagle. To do this we have taken a LED flasher circuit using 555.We have ...
6.3 Datasheets for Key Components
- BK7231 datasheet, pinout, programming, specification, wiki (BK7231T ... — BK7231 GUI Simple Flasher Usage BK7231 GUI Flasher is very ... RGBCW, etc), LED strip controllers, ceiling lamps, etc. Usually a simple PWM-driven LED chips are used: Example chips: SM2083, SM2123E, SM15133E Sometimes, a custom communication protocol is ... Datasheets.com; Electronics Know How; EDN; EEWeb; Electronics-Tutorials; Planet Analog;
- PDF LED FLASHER RELAYS - Swe-Check — Datasheet: 9023 Page: 6 LED FLASHER RELAYS (cont'd.) Bussmann NO-762-LED Heavy Duty Electronic LED Flasher Specifications:FMVSS108, SAE J590B, J945 & J1690 Class A Rated Load: Fixed load 3 to 6 SAE number 1156 lamps. Lamp Ratings: No.1156, 2.1A at12.8V No.1895, 0.27A at 14V 1-12 Amps
- Find Datasheets, Electronic Parts, Components - Datasheets.com — Datasheets.com is the easiest search engine to find datasheets of electronic parts. Search millions of components across thousands of manufacturers. Datasheets. ... Inc KEY HIGH VACUUM PRODUCTS, ... Find the latest content on electronic components. Powered by. Search. Try an example: 98DX243-A2-BCW1C000.
- PDF Standard 0603 SMD LED - RS Components — This innovative 0603 LED technology opens the way to • smaller products of higher performance • more design in flexibility • enhanced applications The 0603 LED is an obvious solution for small-scale, high power products that are expected to work reliability in an arduous environment. PRODUCT GROUP AND PACKAGE DATA • Product group: LED
- PDF Flasher User Guide - Farnell — Flasher User Guide Document: UM08022 Software Version: 6.34 Revision: 3 Date: February 21, 2019 A product of SEGGER Microcontroller GmbH www.segger.com. 2 ... Chapter "Working with Flasher" * Section "LED status indicators" updated. 4.63a 0 130131 EL Chapter "Remote Control" ...
- Design and Build a Simple Analog LED Flasher Circuit - Digi-Key Electronics — 2022-07-13 | By Maker.io Staff. This article introduces you to a simple analog blink circuit that is a true classic for those learning about electronics. Many engineering students build this circuit as their first project, as it only comprises a handful of commonly available and inexpensive components, and the effects of swapping out parts are immediate.
- LED flasher unit - Hella — The LED flasher units can be operated in conjunction with ISO 13207-compliant LED direction indicators. The flasher unit checks the energy requirement, or the so-called pulse, that occurs after the direction indicator is switched on. This pulse is 21 W (equivalent to the pulse of an incandescent bulb) at the time of 100-130 ms. Bulbs and ISO ...
- Electronics Datasheets - Parts Search and Technical Documents — Electronics Datasheets is a search engine containing over 9 million parts from thousands of manufacturers along with a comprehensive resource of datasheets and other technical documents. ... Key Features & Specifications. Chipset and Processing Power ... systems, is integrated into the design. All VCO and loop filter components are integrated ...
- PDF RELAYS AND FLASHERS PRODUCT RANGE - My Hella Lights — Key components of an electromechanical relay Components Contact plates CuZn (brass) Armature Pins for coil wire Switch contacts Coil made of Cu wire (copper) Iron core (in the coil) 1 7 2 3 8 4 9 5 10 6 11 Blade terminal (load) made of E-Cu (electrolytic copper) with tin-plated surface Blade terminal (coil) made of CuZn (brass) with tin-plated ...
- ALLDATASHEET.COM - Electronic Parts Datasheet Search — - Contains over 50 million semiconductor datasheets. - More than 60,000 Datasheets update per month. - More than 460,000 Searches per day. - More than 28,000,000 Impressions per month. - More than 9,990,000 Visits per month all around the world. - More than 7,600,000 Unique Users at Alldatasheet. (As of March 2024)
Related Circuits
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
"> simplest led flasher
Here`s The schematic shown below is a simplest LED flasher circuit. The circuit is using three LEDs which will start blinking or flashing when we provide 9 volt to the circuit. The circuit is so simple it uses a self flashing LED (LED 1) to make all LEDs flash. Self...
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
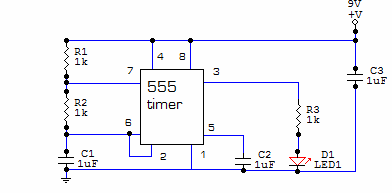
"> Simple Astable 555 Timer IC Flasher
For a lower parts count than the 2 transistor multivibrators, 2 LEDs can be alternately flashed with a 555 integrated circuit configured as shown in Schematic 2. I chose the combination of a 2K2 and a 47K resistor to determine the oscillation frequency along with the 10 uF capacitor connected...
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
"> Transistor LED flasher
By simple, I mean that these circuits only flash one or two LEDs. This is opposed to the light chaser circuits that can flash four or more. Of course, the simplest LED flasher is simply to use a flashing LED. The problem with that approach is you have no control...
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
"> 2 LED flasher with two 2N3904 transistors
This is a simple LED flasher using two 2N3904 transistors. Classic astable multivibrator using 2 transistors. Transistor is not critical. Try these: 2N4401, 2N2222, NTE123A, NTE123AP, NTE159, TUP/TUN and those in your junk box, you may find that most of them will work. Obviously, the 470 ohm resistor determines the...
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
"> 555 LED flasher
This circuit is built around one of the most popular timer integrated circuits, the 555 timer. It will flash the led on and of at regular intervals. From left to right, the two resistors and the capacitor set the time it takes to turn the led on or off, by...
 /var/www/html/nextgr/view-tutorial.php on line 513
/var/www/html/nextgr/view-tutorial.php on line 513Deprecated: htmlspecialchars(): Passing null to parameter #1 ($string) of type string is deprecated in /var/www/html/nextgr/view-tutorial.php on line 513
"> Simple 3-6V LED Flasher
If you are familiar with LED flashers using transistor, you may know the basic one uses two transistor, one capacitor and three resistors. There is other kind of oscillator called "flip-flop". As I'm starting to develop some basic circuits, I need a simple LED flasher that can be used in...