
Sonar-transducer-switch
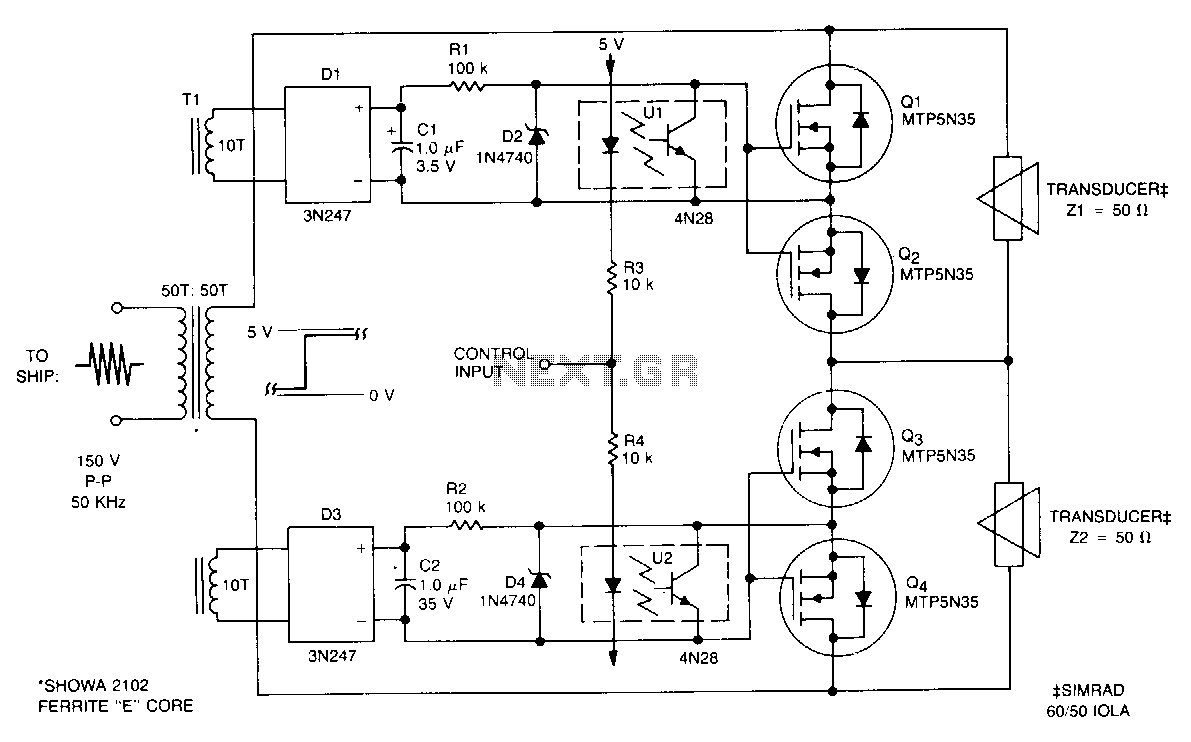
This submersible sonar positioning apparatus primarily comprises dual-opposed ultrasonic transducers that are alternately excited, with the return signals processed and displayed for observation and measurement. Typical transmitter frequencies range from 50 to 200 kHz, and pulse widths can be adjusted from 0.3 to 5 ms, depending on the depth and resolution requirements. The input to the transducer/switch is transformer T1, which provides isolation and impedance matching. The turn ratio of the secondary windings is determined by the peak-to-peak amplitude of the transmitter output into the specified load. The transmitted pulse appearing on the secondary winding charges capacitors C1 and C2 through bridge rectifiers D1 and D3. Zener diodes D2 and D4 limit the TMOS gate bias to 12 V; resistors R1 and R2 limit the discharge current from C1 and C2. A square-wave control input is applied to opto-isolators U1 and U2 through resistors R3 and R4. When the control input is at 0 V, U1 is activated; when it changes to +5 V, U2 is activated. When U1 is activated, it saturates and reduces the gate bias to zero, turning off Q1 and Q2. Q3 and Q4 remain on, effectively shunting transducer Z2. Conversely, when U2 is activated, it saturates and reduces the bias to zero, turning off Q3 and Q4, while Q1 and Q2 remain on, effectively shunting transducer Z1.
The submersible sonar positioning apparatus operates by utilizing dual-opposed ultrasonic transducers that alternate in excitation to emit sound waves into the surrounding medium. The return signals from these transducers are processed to determine the distance and positioning of underwater objects. The system is designed to operate within a frequency range of 50 to 200 kHz, which is optimal for sonar applications, providing sufficient resolution for various depths.
Transformer T1 serves a critical role in the system, ensuring that the transducers are appropriately isolated from the driving circuitry while also matching the impedance for efficient energy transfer. The secondary winding's turn ratio is carefully calculated based on the load conditions, allowing for effective energy transfer during transmission.
The bridge rectifiers D1 and D3 convert the alternating current (AC) signal from the transducer output into a direct current (DC) signal, which is then used to charge capacitors C1 and C2. These capacitors store energy, which is essential for maintaining the operation of the transducers and the associated circuitry. Zener diodes D2 and D4 are implemented to regulate the gate bias voltage for the TMOS transistors, ensuring that the system operates within safe voltage limits.
The control mechanism of the apparatus is governed by opto-isolators U1 and U2, which provide electrical isolation between the control signals and the high-voltage components of the circuit. The use of resistors R3 and R4 ensures that the control signals are properly conditioned before reaching the opto-isolators. The activation of U1 and U2 dictates which transducer is active at any given time, allowing for precise control over the sonar system's operation.
In summary, this sonar positioning apparatus is a sophisticated device that integrates various electronic components to achieve effective underwater positioning through the use of ultrasonic technology. The design ensures reliability, safety, and adaptability to different operational environments, making it suitable for various underwater applications, including navigation, exploration, and surveying.This submersible sonar positioning apparatus generally consists of dual-opposed ultrasonic transducers, alternately excited, with return signals processed and displayed for observation and measurement. Typical transmitter frequencies range from 50 to 200J
The transmitted pulse that appears on the secondary winding charges capacitors Cl and C2 through bridge rectifiers Dl and D3. Zener diodes D2 and D4 limit the TMOS gate bias to 12 V; Rl and R2 limit the discharge current from Cl and C2.
The square-wave control input is applied to opto-isolators Ul and U2 through resistors R3 and R4. If the control input is 0 V, Ul is activated; when it changes to +5 V, U2 is activated. When Ul is activated, it saturates and reduces the gate bias to zero, turning Ql and Q2 off. Q3 and Q4 remain on, effectively shunting transducer Z2. When U2 is activated, it saturates and reduces the bias to zero, turning Q3 and Q4 off. Ql and Q2 remain on, effectively shunting transducer Zl. 🔗 External reference
The submersible sonar positioning apparatus operates by utilizing dual-opposed ultrasonic transducers that alternate in excitation to emit sound waves into the surrounding medium. The return signals from these transducers are processed to determine the distance and positioning of underwater objects. The system is designed to operate within a frequency range of 50 to 200 kHz, which is optimal for sonar applications, providing sufficient resolution for various depths.
Transformer T1 serves a critical role in the system, ensuring that the transducers are appropriately isolated from the driving circuitry while also matching the impedance for efficient energy transfer. The secondary winding's turn ratio is carefully calculated based on the load conditions, allowing for effective energy transfer during transmission.
The bridge rectifiers D1 and D3 convert the alternating current (AC) signal from the transducer output into a direct current (DC) signal, which is then used to charge capacitors C1 and C2. These capacitors store energy, which is essential for maintaining the operation of the transducers and the associated circuitry. Zener diodes D2 and D4 are implemented to regulate the gate bias voltage for the TMOS transistors, ensuring that the system operates within safe voltage limits.
The control mechanism of the apparatus is governed by opto-isolators U1 and U2, which provide electrical isolation between the control signals and the high-voltage components of the circuit. The use of resistors R3 and R4 ensures that the control signals are properly conditioned before reaching the opto-isolators. The activation of U1 and U2 dictates which transducer is active at any given time, allowing for precise control over the sonar system's operation.
In summary, this sonar positioning apparatus is a sophisticated device that integrates various electronic components to achieve effective underwater positioning through the use of ultrasonic technology. The design ensures reliability, safety, and adaptability to different operational environments, making it suitable for various underwater applications, including navigation, exploration, and surveying.This submersible sonar positioning apparatus generally consists of dual-opposed ultrasonic transducers, alternately excited, with return signals processed and displayed for observation and measurement. Typical transmitter frequencies range from 50 to 200J
The transmitted pulse that appears on the secondary winding charges capacitors Cl and C2 through bridge rectifiers Dl and D3. Zener diodes D2 and D4 limit the TMOS gate bias to 12 V; Rl and R2 limit the discharge current from Cl and C2.
The square-wave control input is applied to opto-isolators Ul and U2 through resistors R3 and R4. If the control input is 0 V, Ul is activated; when it changes to +5 V, U2 is activated. When Ul is activated, it saturates and reduces the gate bias to zero, turning Ql and Q2 off. Q3 and Q4 remain on, effectively shunting transducer Z2. When U2 is activated, it saturates and reduces the bias to zero, turning Q3 and Q4 off. Ql and Q2 remain on, effectively shunting transducer Zl. 🔗 External reference
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713