
Stepper Motor Driver
If you look at the other references you will find that the circuit in this kit has been around for many years in various forms. The latest publication was in Silicon Chip, 5/2002, and I have based this circuit on it. This controller works in either free-standing or PC controlled mode. In free-standing mode an internal square-wave oscillator based on IC2:B of the 4093 supplies timing pulses to the OSC output.
The frequency of these pulses and thus the speed of the stepper motor is controlled by the trimpot VR1 (100K. ) A series 1K resistor controls the maximum frequency. You may increase the value of this resistor for your own needs. These pulses are fed into the STEP input which is buffered and inverted by IC2:D. This helps prevent false triggering. Similarly, IC2:C buffers and inverts the DIRection input. A SPDT taking the input to +5VDC or ground controls the direction of rotation. IC3:C and D (4030 or 4070 exclusive OR gates) invert the outputs available at Q and /Q outputs of each of the flip-flops (FF) IC4:A and IC4:B.
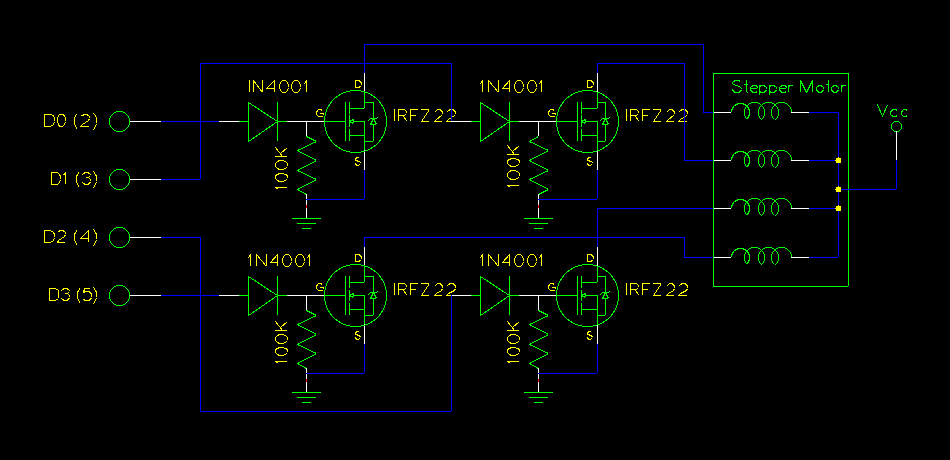
The incoming step-pulses clock the FF, thus toggling the Q & /Q outputs and this turns the MOSFET`s on and off in sequence. The IRFZ44`s have a low on-resistance and can deliver up to 6A each without needing a heatsink. Power to the stepper motor is connected to V+ and GND terminals as shown on the overlay. There is a separate power supply, KITV, to the 78L05 to power the IC`s. 9V 12VDC will be sufficient. R2/C2 form a low-pass filter to filter fast-rise switching transients from the motor. Note that some stepper motor texts say to use a 4070 instead of a 4030. We have not worked out why this is. Certainly our testing with the 4030`s showed no problems. I would like to hear from anyone who knows why this advice is sometime given. In computer-controlled mode use the three pads with pins DIR, STEP and GND. Switch the SPDT switch to EXTernal. The direction SPDT has no effect in external mode. (Fig 2). Eight-wire motors bring out both ends of each coil. The four center-taps are joined externally to form one wire. In each case the center-tap(s) are connected to a positive motor power supply. In able to move the rotor you will need a driver. Driver is a circuit that applies a voltage to any of the four stator coils. Driver can be built with IC such as ULN2003 (pictured on the circuit diagram), four darlington transistors or four power transistors such as 2N3055.
Note that after further testing we have changed the values of the trimpot and R1 from that shown on the PCB overlay. Put the resistors and 4 links in first. Use the cutoff lengths from the resistors for the links. Add the o 🔗 External reference
Related Circuits
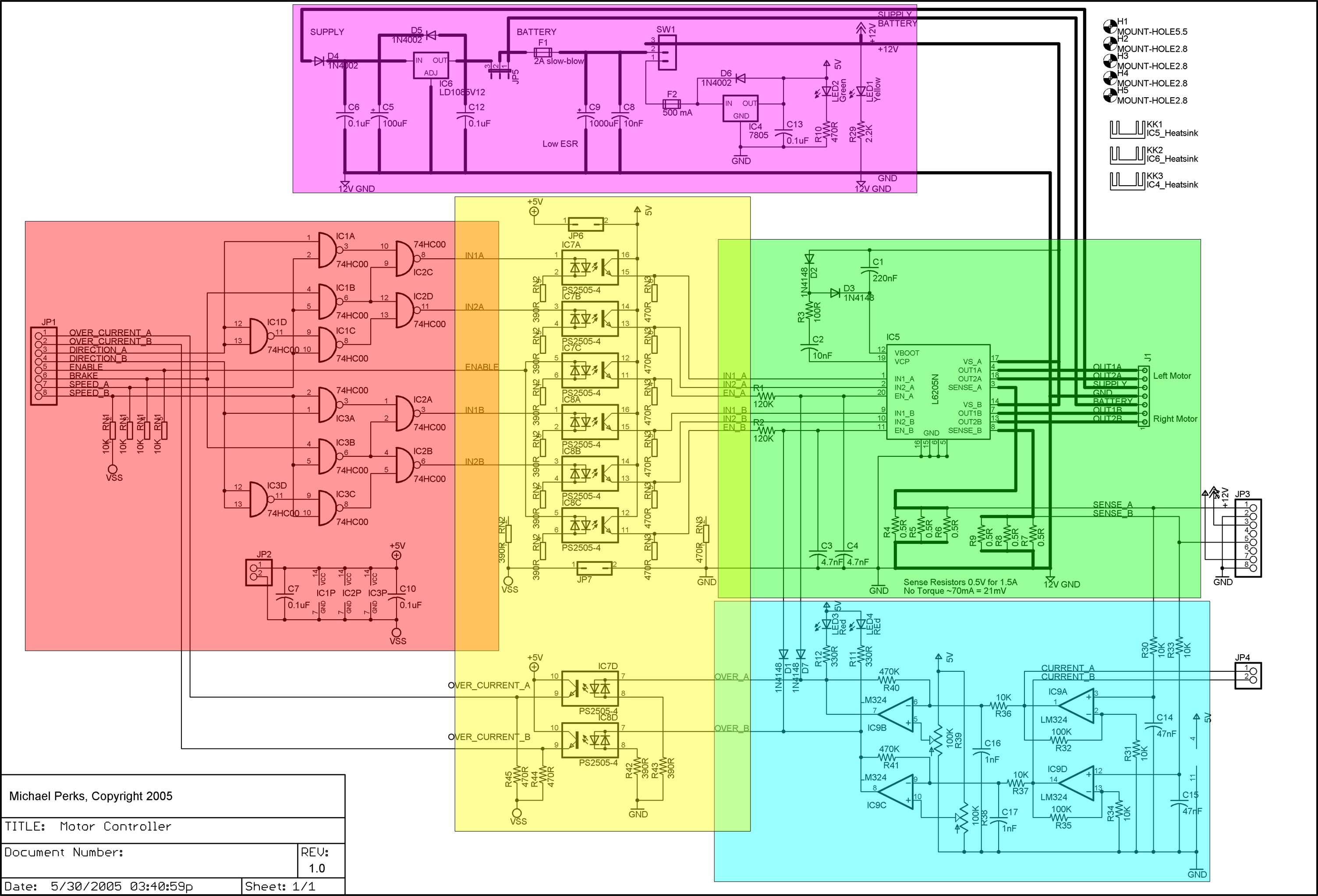
A dual DC motor controller employs an H-bridge controller chip. In addition to the standard features of the H-bridge driver chip, such as thermal and over-current protection, the circuit supports dual 12V/5V regulated power supplies, sign/magnitude and brake driver...
This design is based on one published by Milan Lulic in the German magazine elektroModell. Mr. Lulic's design is for surface mount technology (SMT) construction, whereas mine uses standard off-the-shelf components, and is therefore better suited to construction by...
Several individuals have encountered difficulties in locating the transformer required for the Black Light project. Consequently, a search was conducted to identify a fluorescent lamp driver that operates without the necessity for specialized components. A suitable option was discovered...
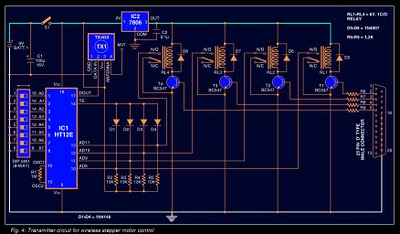
Stepper motors are widely used in applications such as process control, machine tools, and robotics. In particular, remote control of stepper motors is essential in robotics and process control. This document provides the circuit diagrams for both the transmitter...
The use of a PC's parallel port provides a convenient method for controlling a stepper motor. For unipolar stepper motors, it is possible to control up to two motors using the 8-bit data line. Typically, a Darlington driver, such...
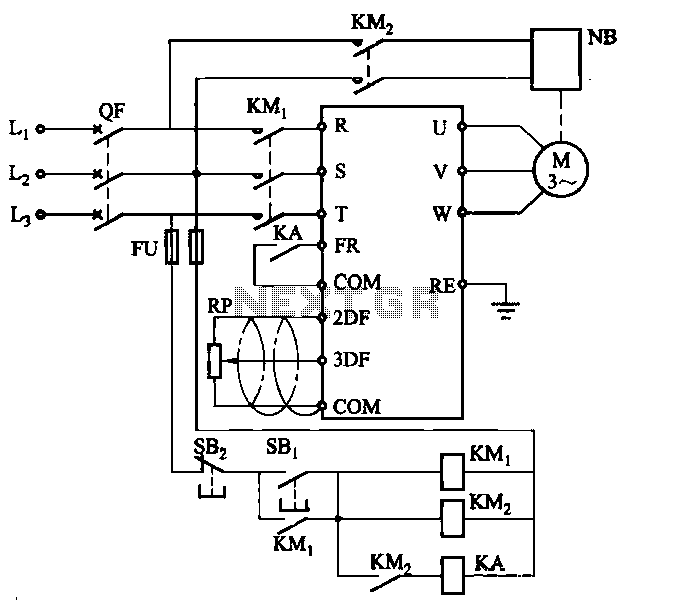
Electromagnetic brake motors consist of a motor and an electromagnetic brake, forming a standard assembly. The circuit diagram is provided. In this configuration, FR represents the forward run and stop command terminal, while the intermediate relay KA is employed...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713