
Ultrasonic Distant Obstacle Detector
Obstacle detectors are essential components in robotic systems, designed to enhance navigation and safety by identifying and responding to physical barriers in the robot's environment. These sensors can be categorized into three primary types: ultrasonic sensors, infrared sensors, and LIDAR systems, each with its unique operational principles and applications.
Ultrasonic sensors operate by emitting high-frequency sound waves and measuring the time it takes for the echo to return after bouncing off an obstacle. This time delay is then converted into distance, allowing the robot to detect objects within a specified range. These sensors are particularly effective in indoor environments and can be used to avoid collisions with stationary or moving obstacles.
Infrared sensors, on the other hand, utilize infrared light to detect obstacles. They emit infrared radiation and measure the intensity of the reflected light. When an object is in proximity, the amount of reflected light changes, indicating the presence of an obstacle. Infrared sensors are commonly used in line-following robots and applications where quick response times are required.
LIDAR (Light Detection and Ranging) systems represent a more advanced form of obstacle detection. They use laser pulses to measure distances with high precision. By scanning the environment and creating a detailed map, LIDAR systems can identify obstacles with great accuracy, making them suitable for complex navigation tasks in dynamic environments.
In summary, the choice of obstacle detector depends on factors such as the environment, required precision, and the nature of the obstacles to be detected. Each sensor type has its advantages and limitations, and selecting the appropriate one is crucial for effective robotic operation and navigation.The first sensor a robot usually gets fitted with is an obstacle detector. It may take three different forms, depending on the type of obstacle you want t.. 🔗 External reference
Related Circuits
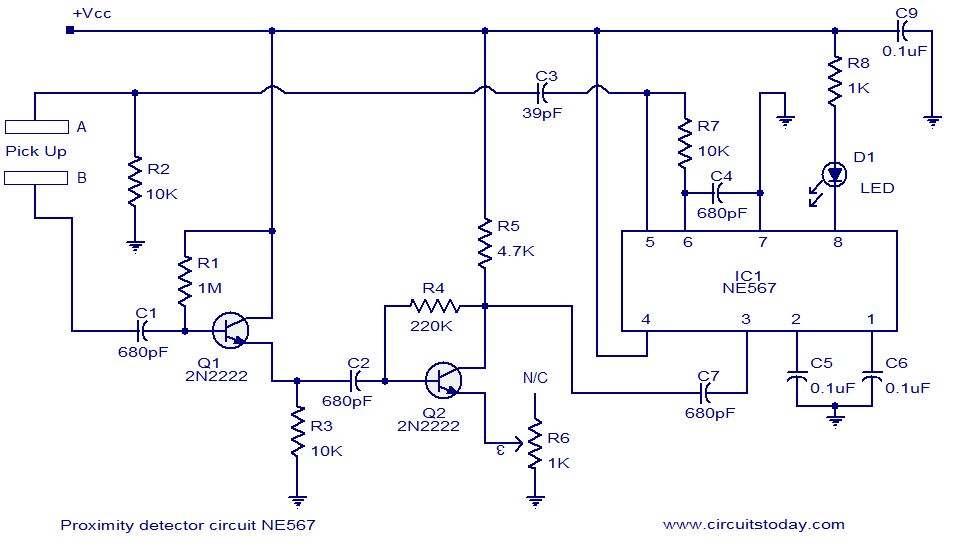
A simple proximity detector circuit utilizing the NE567 integrated circuit (IC). The circuit activates an LED when an object approaches the sensor. The NE567 is a versatile phase-locked loop (PLL) device commonly used for applications such as proximity detection due...
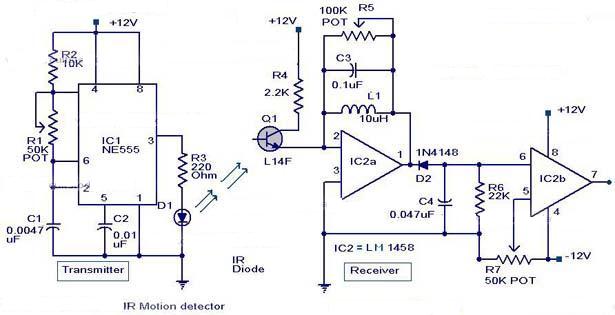
The circuit diagram depicts an infrared motion detector designed to detect intrusions. Infrared rays reflected from a stationary object exhibit one phase, while rays reflected from a moving object display a different phase. This principle is utilized for motion...
The original coil that came with the Heathkit project was preassembled at the factory. It had a diameter of around 15 cm (6 inches). A larger (30 cm, 12 inches) coil can be made using the following data. The design...

The gas detector designed in this instance utilizes an ARM microprocessor as its core for measurement and control. It not only incorporates advanced one-chip computer microprocessing technology from the 1990s but also features several enhancements. The device employs an...
A schematic diagram of a fast pulse detector is shown in the figure below. An error detection rate of under 10% can be expected for a 60 ns pulse to achieve error-free operation. The fast pulse detector circuit is designed...
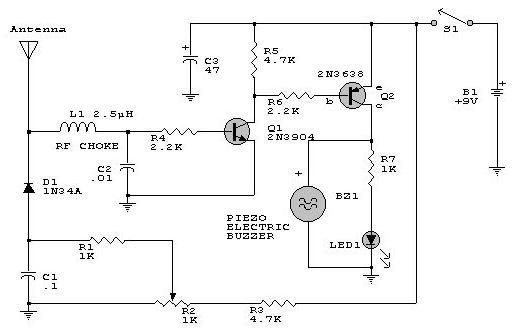
This electronic RF detector project is designed using common transistors and a few standard electronic components. The RF detector responds to RF signals below the standard broadcast band and well over 500 MHz, providing both visual and audible indications...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713