
Building an RF Remote Control System For Robotics Control

The Ruf-Bot project exemplifies the integration of RF (Radio Frequency) technology into robotics, showcasing how simple components can be utilized to create functional robotic systems. The primary components typically involved in such projects include microcontrollers, RF transmitter and receiver modules, power supplies, and various sensors or actuators depending on the intended functionality of the robot.
In constructing the RF transmitter and receiver, it is crucial to select modules that operate within compatible frequency ranges, such as 433 MHz or 2.4 GHz, which are commonly used for short-range communication. The transmitter module is connected to the microcontroller, which sends control signals based on user input or pre-programmed instructions. The receiver module, on the other hand, receives these signals and relays them to the microcontroller for processing, enabling the robot to respond to commands.
When designing the circuit on a breadboard, careful attention must be paid to the layout to minimize interference and signal degradation. The metal traces on the breadboard can introduce capacitance, which may lead to unintended circuit behavior. It is advisable to keep the wiring short and organized, avoiding unnecessary loops that could act as antennas and pick up noise. Additionally, using decoupling capacitors near the power pins of the microcontroller and RF modules can help stabilize the power supply and reduce noise.
Power management is another critical aspect of the project. A suitable power supply must be chosen to ensure that both the microcontroller and RF modules operate within their specified voltage ranges. Battery packs or regulated power supplies are common choices, and incorporating a voltage regulator may be necessary to maintain stable operation.
Programming the microcontroller using PicBasic involves writing code that defines the behavior of the RF transmitter and receiver. This includes setting up the communication protocol, managing input from sensors, and controlling actuators such as motors or servos to achieve desired movements or actions. Debugging the code and testing the RF communication range are essential steps to ensure reliable operation of the Ruf-Bot.
In conclusion, the Ruf-Bot project highlights the potential of combining inexpensive components with creative engineering to build sophisticated robotic systems. By understanding the intricacies of RF communication and circuit design, users can develop their own unique robotic creations, enhancing their skills and knowledge in electronics and programming.With a handful of inexpensive components, a little creativity, and the power of PicBasic, you can build some pretty outstanding robotics creations as Rob Arnold proves with his Ruf-Bot project. RF remote control is just way too cool not to use in your designs, but if you`re a newbie like me it`s difficult to successfully build solid RF transmitters and receivers on your own.
When I started out I didn`t realize that the larger breadboard I was working off of was causing a lot of the signal deviance because the metal traces on the breadboard worked like small capacitors, and changed my circuit dynamics. 🔗 External reference
Related Circuits
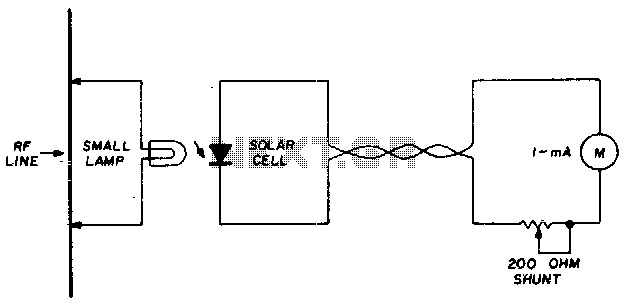
A suitable pilot lamp is illuminated by a small sample of RF energy and energizes an inexpensive solar cell; the DC current generated by the cell serves as a measure of relative RF power and may be routed to...
This is a personal website showcasing various projects developed during spare time, many of which are related to electronics and Linux. The website itself is one of these projects. It also features a section with pictures from places visited...
A servo controller has evolved from a "servo slower" unit, designed to reduce the slew rate (traverse time) of proportional servos. In model boats, this device is commonly used to control the rotation of a servo-driven gun turret, as...
When the detect subroutine is invoked, it initially waits for a start bit. The duration of the low segment of the first start bit is measured. If the low pulse of the first start bit exceeds 1.020 ms or...
The microcontroller IC is a device that resembles a typical integrated circuit. However, it contains a miniature computer within its architecture. This device can serve as a replacement for transistors. Microcontroller integrated circuits (ICs) are compact, multifunctional devices that integrate...
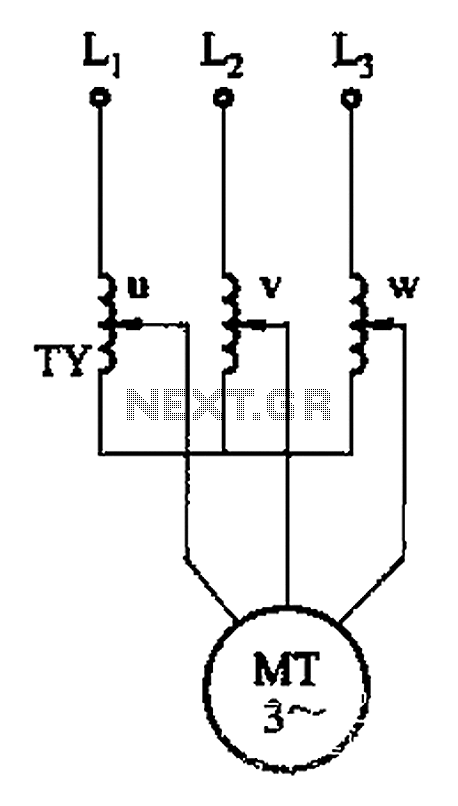
The circuit depicted in Figure 3-176 illustrates an adjustment method that allows the motor to operate at equilibrium. The adjustment range is relatively wide; however, it necessitates a three-phase voltage regulator, which incurs higher input costs. The circuit design in...