
ZKJ-S-type buffer controller circuit

The ZKJ-S-type buffer controller circuit utilizes two key operational amplifiers to achieve effective motor control. The first operational amplifier, Ai, serves as a speed amplifier and is configured to operate in saturation mode, which enhances the responsiveness of the system to changes in input signals. This saturation characteristic allows for rapid adjustments in output, making the circuit suitable for applications that require quick motor acceleration or deceleration.
The second operational amplifier, Az, functions as an integrator. This integration capability is crucial for processing the input signals over time, providing a smooth control response that mitigates abrupt changes in motor speed. By integrating the input signal, Az helps maintain a steady output voltage that reflects the desired motor speed, thus facilitating more precise control.
The inclusion of the variable resistor RP2 and the fixed resistor RPa allows for customization of the circuit's response characteristics. By adjusting RP2, the rate of change of the output voltage can be modified, which directly influences the motor's slip during acceleration and deceleration. This feature enables fine-tuning of the motor's performance to suit specific operational requirements, enhancing both efficiency and control.
Overall, the ZKJ-S-type buffer controller circuit exemplifies a robust design for slip control in motor applications, leveraging the capabilities of operational amplifiers to achieve precise and responsive motor control.As ZKJ-S-type buffer controller circuit for motor starting slip control. Buffer controller by the two operational amplifier Ai and Az composition. Ai constitute a speed amplifier saturated, Az constitute an integrator. Blame saving locator RP2, RPa, can change the rate of change of the output voltage, that is changing the slip of the motor acceleration and deceleration degree.
Related Circuits
This 555 timer based PWM controller features almost 0..100% pulse width regulation using R1, while keeping the oscillator frequency relatively stable. The frequency is dependent on values of R1 and C1, values shown will give a frequency range from...
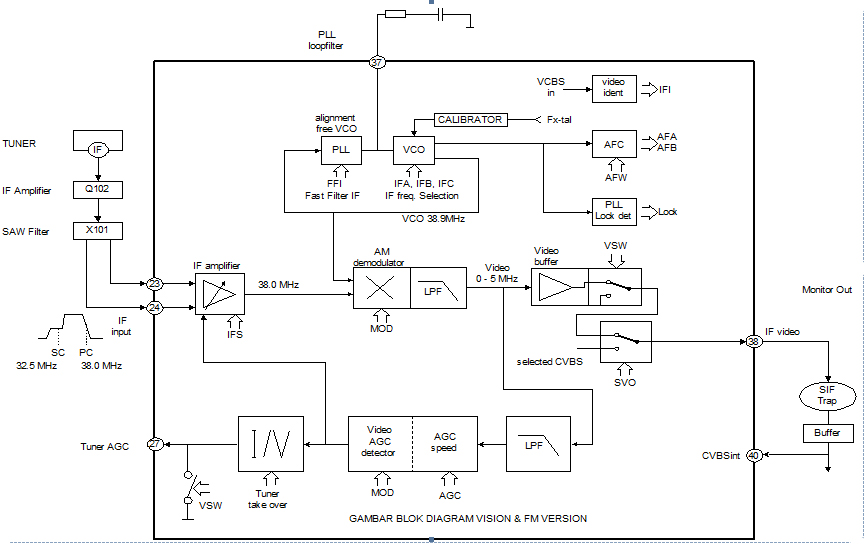
This section is designed to amplify the signal until it reaches the required level. The IF amplifier is equipped with an Automatic Gain Controller (AGC) that regulates the amplification to ensure a constant amplitude output for the video. The...

Children often go missing, causing immense suffering and economic losses for families. This situation also presents opportunities for unscrupulous child traffickers to exploit. To address this issue, a radio alarm system has been designed, which consists of a transmitter...
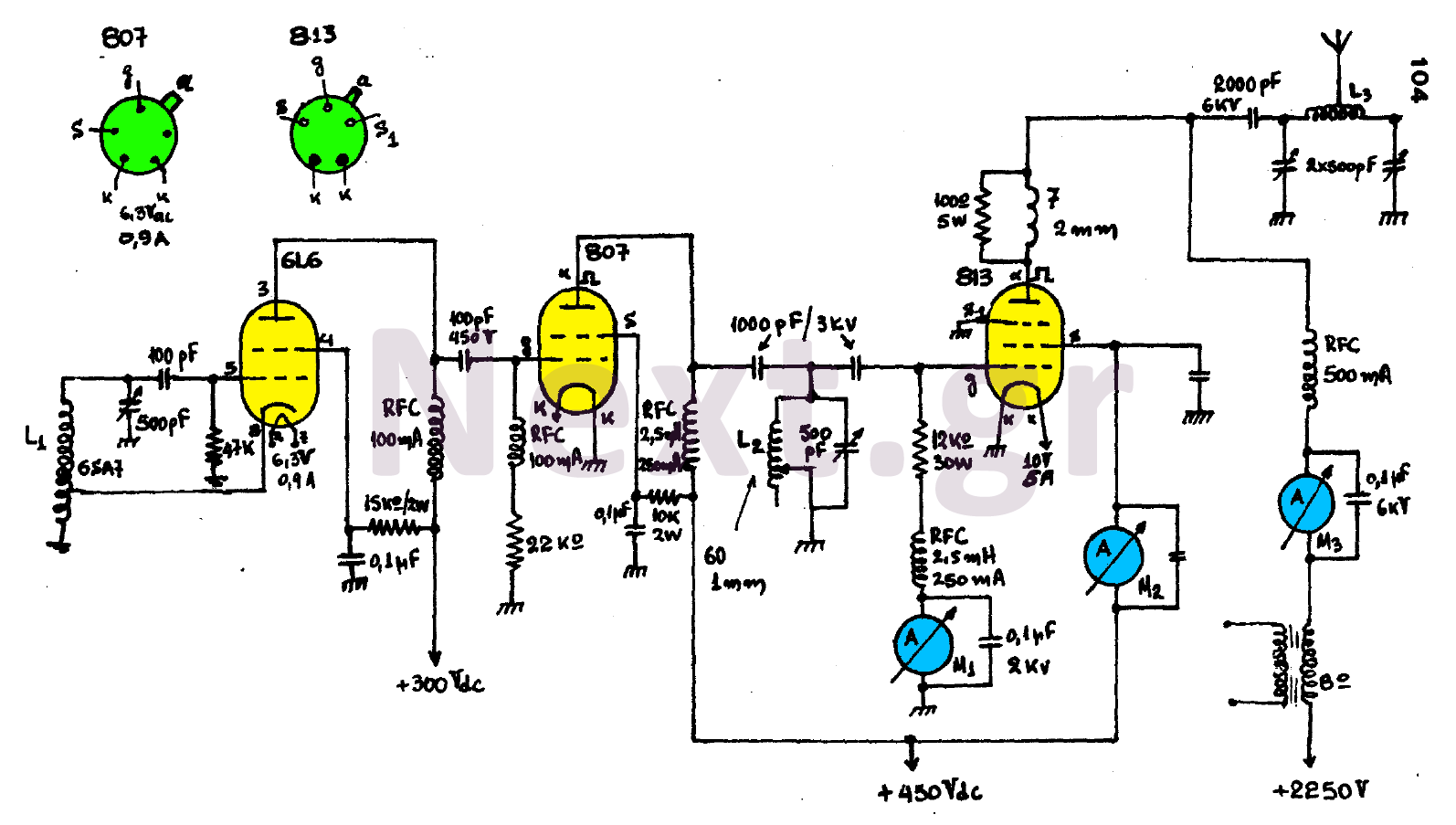
The circuit consists of three main stages and provides the antenna with a power output of 300 watts, contingent upon proper tuning. The first stage is an oscillator featuring an oscillating coil L1, which is commercially available as a...
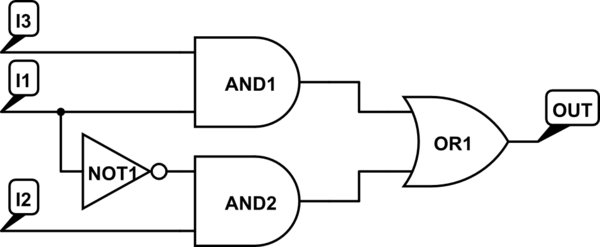
There are integrated circuits that contain AND, OR, and NOT gates. The inquiry revolves around the existence of a single chip that encompasses all the required logic gates. If such a chip does not exist, specific alternatives should be...

The core component of the motion detection circuit is the motion detection chip IC1 (KC778B). The signal frequency from the PIR sensor is low, ranging from 0.1Hz to 10Hz, while the bandwidth is quite broad, which the chip will...