
H Bridge Qik 2s12v10 Dual Serial
The H-bridge circuit design is critical for applications requiring precise motor control in robotics, particularly in competitive environments like Sumo-bots. The integration of MOSFETs or BJTs in the H-bridge allows for efficient switching and control of motor direction and speed. In this configuration, the four transistors are arranged in an H-shape, enabling bidirectional control of the motor. When the appropriate transistors are activated, current flows through the motor in one direction, while activating the opposite pair reverses the current, allowing for reverse motion.
The Pololu Qik 2s12v10 controller is particularly advantageous due to its dual motor control capability, enabling the simultaneous operation of two motors. The use of PWM (Pulse Width Modulation) for speed control allows for fine-tuning of motor performance, which is essential in competitive robotics where precision is paramount. The ability to set limits on current draw protects the motors and the H-bridge from damage due to excessive load conditions.
The serial communication interface simplifies integration with microcontrollers such as Arduino, providing a user-friendly method for sending commands and receiving feedback. This feedback loop is crucial for monitoring the operational status of the motors, allowing for real-time adjustments based on performance metrics such as current draw and speed. The calibration command facilitates automatic detection of the optimal settings, enhancing the adaptability of the system in various operational scenarios.
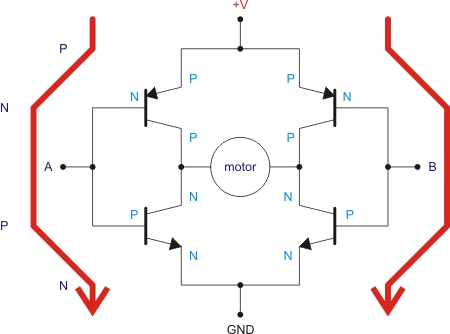
Overall, the H-bridge circuit, particularly when implemented with controllers like the Pololu Qik 2s12v10, represents a robust solution for driving motors in robotic applications, balancing performance, control, and safety.This H-bridge i`m using now for my Sumo-bot ( This H-bridge )I think is fairly good for medium size motors ( untill 30A peak and 13 A continuous mode). The price is arround $75 plus sending. We start talking about what is a "H-bridge". One H-bridge is a intermediate control phase between microprocessor and motors. With this element you can co nvert the low intensity microprocessor signals into power signal to feed and manage the motors. One microprocessor can only take out arround 50 mA in each out-pin and one robotic motor can consume form 150 mA to 2 or 5 peak Ampers. In this case, our powerful motors could drain 5A in stall. The basic circuit is make up with four transistors, MOSFET or BJT. The name of "h-Bridge come from the shape of the basic schematic diagram. See the picture below. Thispololu Qik 2s12v10 Dual Serial Motor Controller is controlled by a Serial Port. Usually this kind of electronic boards are managed by PWM outputs. With this type of H-Bridge we can check, control and limite more variables like acceleration, current limitation, erros and data feedback.
With one single cable ( with also ground conection of course) we can also control speed and direction. All the square pins are ground (GND) and you can not feed the board from the low intensity side (left, battery output).
You must connect the source or battery on the right side. ( power side) To setup the Serial speed, you must short the 1 and 2 jumpers (like shown below), and we will work with 9600 bps. If we want use auto-detect mode, we shold send a calibration command "0x00" via Serial. For other speed you can read user guide `s baud rate table. Connecting Arduino board is quite easy, just connect Tx (transmiter) from Arduino to Rx (receptor) from H-Bridge and vice versa.
We can recive data from the H-bridge like configurations, diagnosis, erros, currents, speeds. 🔗 External reference
Related Circuits
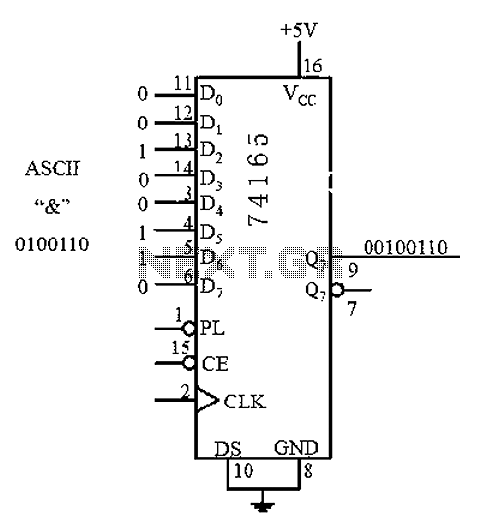
An 8 parallel input/serial output interface circuit. An 8 parallel input/serial output interface circuit is designed to convert multiple parallel data inputs into a single serial output stream. This type of circuit is commonly used in digital systems where data...
This device includes a ringing generator and a tone oscillator. The tone oscillator is configured to operate at either 350 Hz or 440 Hz. The ringing generator is a sealed module providing 86 Vac at 20 Hz. Upon application...
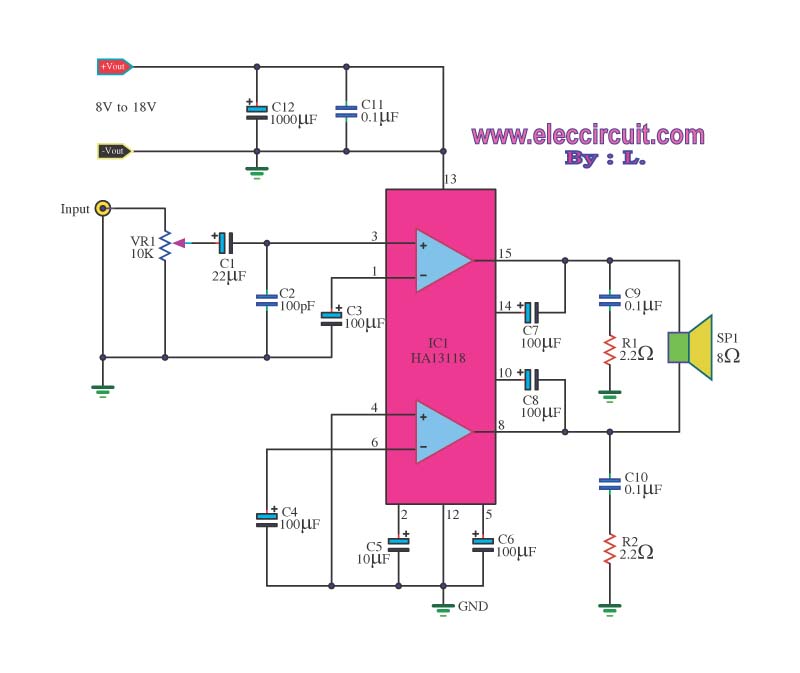
The amplifier circuit utilizes the HA13118 IC, a Hitachi component designed to deliver 18 watts of output power. This integrated circuit operates as a Class AB amplifier. The HA13118 IC is a versatile audio amplifier designed for high-fidelity applications, providing...
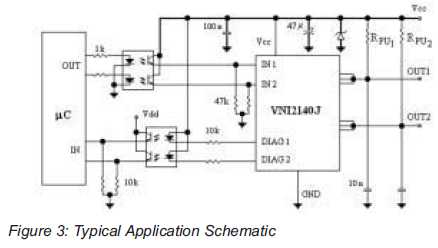
An integrated solution for two output channels that simplifies design and enhances reliability. The device, the VNI2140J, integrates on-chip two 45V Power MOSFET channels with a typical Rds(on) of 80mOhm at 25 degrees Celsius. The VNI2140J is a highly integrated...
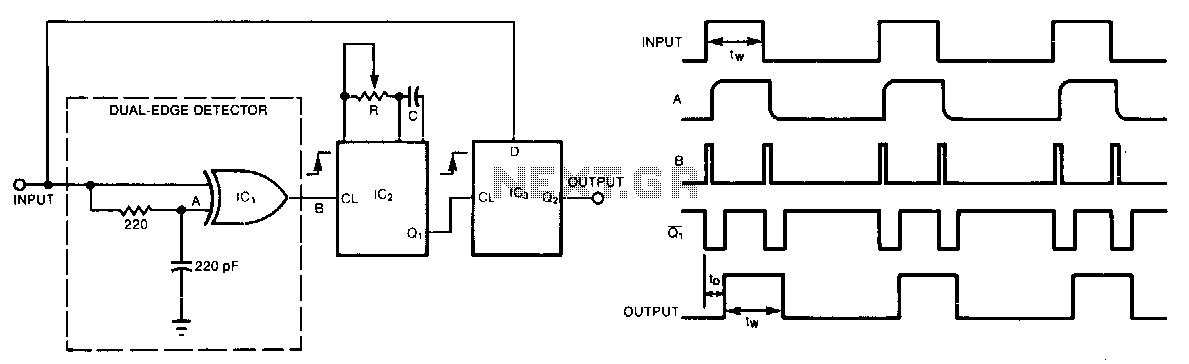
A single monostable multivibrator delays a pulse train by a variable amount; however, this amount cannot be less than the minimum allowed pulse width. The exclusive-OR gate, IC1, generates a short pulse following every leading or falling edge of...
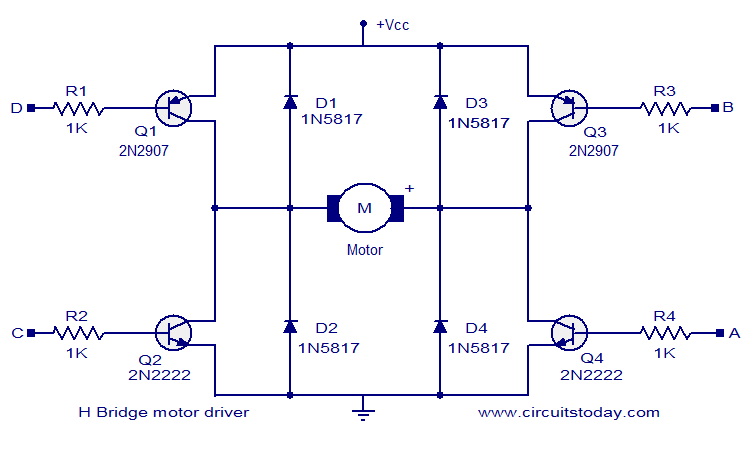
The circuit presented is a simple H-bridge motor driver circuit utilizing commonly available components. An H-bridge is an efficient method for driving motors and is widely used in various electronic projects, particularly in robotics. The circuit illustrated is a...