
Making a Line Sensor using IR Receiver
The circuit diagram provided on the website is unclear and difficult to read. A request has been made for a clearer copy of the main board circuit diagram. Additionally, there are comments regarding the limitations of the website's image size, which restricts the amount of detail that can be displayed.
A line follower robot operates through the use of an array of line sensors that detect the contrast between the line and the surface below. Each sensor unit typically consists of an infrared LED (transmitter) and a photodiode or phototransistor (receiver). When the infrared light emitted by the LED reflects off the surface, the receiver detects the intensity of the reflected light. If the sensor is over the line, the reflected light will be less intense than when it is over the surrounding surface, allowing the robot to determine its position relative to the line.
The control system of the line follower robot is generally implemented using a microcontroller, which processes the signals from the line sensors. Based on the sensor readings, the microcontroller adjusts the movement of the robot by controlling its motors. For example, if the left sensor detects the line while the right sensor does not, the microcontroller may command the right motor to speed up, guiding the robot back to the line.
Power for the robot is typically supplied by a battery pack, which should be chosen based on the voltage and current requirements of the motors and the microcontroller. The overall design can be enhanced with additional features such as speed control, obstacle avoidance, and more advanced navigation algorithms.
In constructing the robot, the use of a veroboard allows for easy prototyping and modification of the circuit. Components such as resistors, capacitors, and driver circuits may be added to improve performance and reliability. Proper soldering techniques and layout considerations are essential to ensure a functional and durable circuit.
For users seeking further information or assistance, it is advisable to consult detailed schematics and assembly instructions, which should ideally be provided in high-resolution formats for clarity.A line follower robot, or a LFR in short, is a simple autonomous robot that optically tracks a line made on the surface of the floor. That means you have an arbitrary line drawn on the floor and the robot tracks it by moving right along it!
The line is sensed using a piece of hardware called a line sensor. A line sensor can be easily made using a low cost IR Rx/Tx pair. The IR Rx emmits IR radiation and the Rx helps in receiving the waves. See the figure below for working of line sensor. Actually a group of such sensor units as described above is required to make a line follower robot. We generally use 3 or 5 such sensor unit to make a line sensor array. The complete steps are described below. You need small piece of veroboard (general purpose PCB). Recently, I purchased LFR from you to demonstrate to my kids. The circuit diagram given in your web site is faint so not readable. Could you kindly send me cleary copy of the circuit diagam of main board Thank you very much in advance. It is so because you were too fast in asking. Just click on the image it will enlarge. Today I am feeling pity that even after giving so much info, also I have to teach user please click here, click there too !
People quickly find faults in others NOT in their selves. On web site their is only a space for 500pixel wide image so it cannot contain more data than that, you need to click the image to download larger version. Its common sense. 🔗 External reference
Related Circuits
The project was inspired by attending the HamRadio 2000 Millennium Ham Meet in Hyderabad on December 22, 23, and 24, where interactions with esteemed individuals such as VU2NR and VU2RM took place. The latest design by VU2NR, the NR-80,...
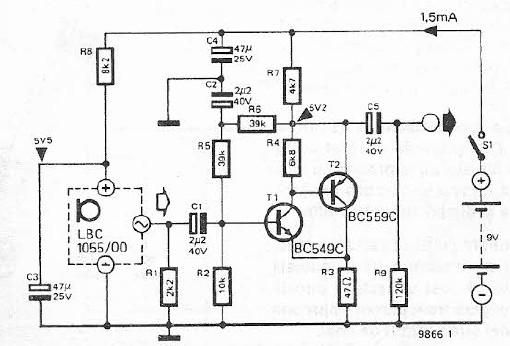
This electret microphone amplifier is constructed using standard electronic components. It is designed to work with an electret microphone capsule, although it can also accommodate a dynamic microphone that has low resistance. The circuit operates with a supply voltage...
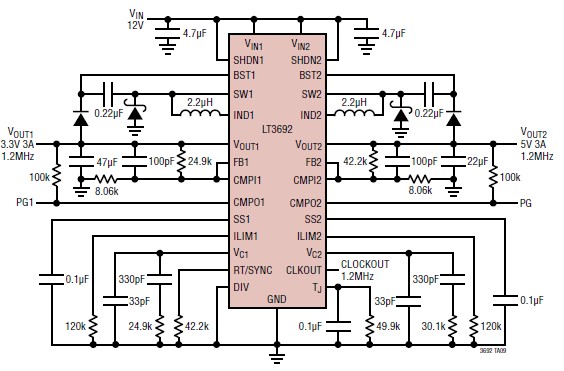
A 3.3V and 5V DC-DC converter circuit design project utilizing the LT3692 dual tracking regulator. The LT3692 is a highly efficient dual-output DC-DC converter designed for applications requiring both 3.3V and 5V outputs. This integrated circuit can provide a regulated...
This is a preselector circuit designed for shortwave (SW) receivers, specifically a do-it-yourself (DIY) high-frequency preselector. The circuit employs a modern low-capacitance MOSFET with two gates, which generates a negative inverse reaction through an uncoupled source resistor. When applied...

A schematic diagram of the remote-control receiver is presented. The core component of the circuit is IC1, a PIC16C54 8-bit CMOS microcontroller produced by Microchip. The microcontroller retains its data in IC2, a 93LC46 1-kbit serial EEPROM (electrically erasable...

Free-space optical (FSO) communication utilizes light as a medium for data transmission. Communication was established between two computers using a laser, independent of any conventional communication methods. Text messages were sent from one PC to another using a system...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713