
Augmenting Plant Behavior Through Robotics using Arduino

The PhytoBot's design integrates a microcontroller to process sensor data from light sensors, which detect both the intensity and direction of incoming light. This data is utilized to control the servos, allowing the plant to orient itself toward the most favorable light source. The servos are selected based on their precision and responsiveness, ensuring accurate movements in both the x and y axes.
The pulsing lights are driven by a series of LEDs that are modulated based on the microcontroller's analysis of the light sensor readings. A pulse-width modulation (PWM) technique is employed to create a smooth transition between the on and off states of the LEDs, enhancing the visual representation of the plant's "breathing" behavior. The frequency of the pulsing is programmed to vary, with thresholds established to differentiate between healthy and light-deprived conditions.
The mechanical structure of the PhytoBot is designed to accommodate the movement capabilities while maintaining stability. The base supports the servos and provides a solid foundation, while the plant structure is lightweight to facilitate agile movements. The use of flexible materials for the plant's body allows for realistic twitching motions, further enhancing the interactive experience.
In summary, the PhytoBot combines advanced sensor technology, precise servo control, and visually engaging light displays to create an interactive experience that challenges traditional perceptions of plant life, emphasizing their responsiveness and vitality. This innovative approach serves not only as an artistic expression but also as an educational tool, fostering a deeper understanding of the dynamic nature of living organisms.The PhytoBot is a semi-intelligent plant which responds to external stimulus (light intensity and light location) and responds to it as a phototropic plant would. Essentially it is designed as a piece of interactive artwork for operation over a long period of time.
The motivation driving this was triggered by the lack of understanding & acceptance of plants as reactive living organisms. Many of us are so used to placing life on merely objects that have visual and audible external responses which can be seen by the naked eye. Plants on the other hand tend to be overlooked as their responses are more drawn out over time and hence we tend to see them as inanimate objects.
The PhytoBot has two degrees of freedom and motion, rotational and angular (from the normal). The rotational range of motion is 360 degrees whereas the vertical/angular range is approximately 70 degrees. The second component of the response is the pulsing lights on the face. The lights pulse from on to off in a smooth glowing fashion as if the plant was breathing. The variance in frequency is driven by the amount of light given to the plant. A fast pulse indicates that the plant is healthy, and a slow pulse indicates that the plant is in need of more light.
There are two basic mechanical features within the PhytoBot. When the PhytoBot actively seeks light, it is oriented by two servos in the x and y axes. When the light has been located the plant will twitch depending on how far away the light source is. For example a closer point light will produce more twitching than if the Plant was facing the sun. 🔗 External reference
Related Circuits
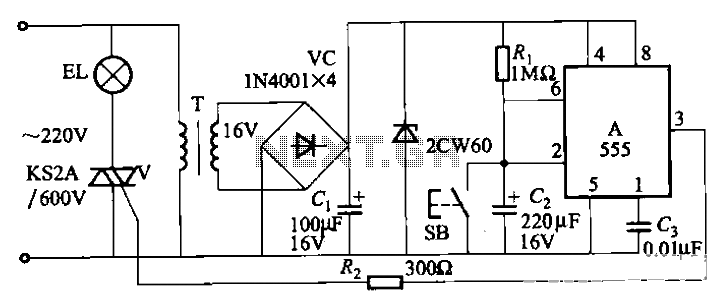
The circuit utilizes a 555 timer IC to create a lighting group delay effect, as illustrated in Figure 2-46. It consists of the 555 IC along with a resistor and capacitor configuration that establishes the delay. The circuit remains...
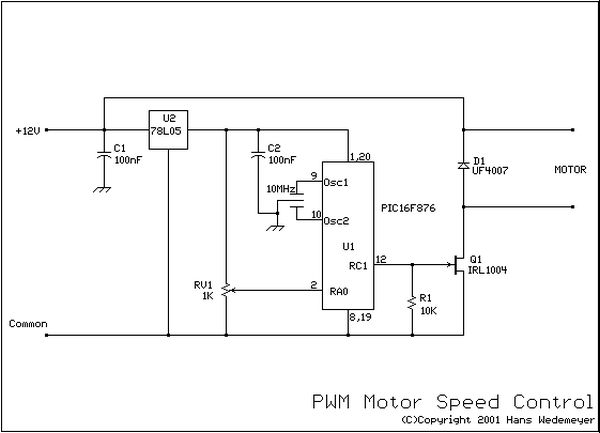
The 1-megohm resistor protects the FET from potential damage caused by accidental sparks to its gate lead. The circuit functions adequately without this resistor; however, it is advised not to intentionally apply a charge to the gate wire using...
If EAGLE is not available, a full working version can be downloaded from CadSoftUSA. A zip file containing the EAGLE schematics is provided. The EAGLE software is a widely used electronic design automation (EDA) tool that facilitates the creation of...
Circuit stereo TDA2822 audio power amplifier circuit schematics. In this series, the TDA2822M IC is utilized as the primary amplifier. Additionally, alternatives such as KA2209 and NJM2073 can also be employed. The TDA2822 audio power amplifier circuit is designed to...
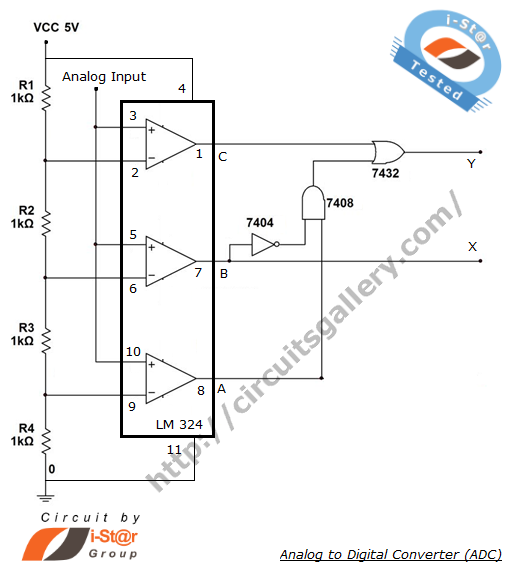
The process of converting an analog voltage into an equivalent digital signal is known as Analog to Digital Conversion (ADC). An ADC is an electronic circuit that converts its analog input to a corresponding binary value. The output depends...
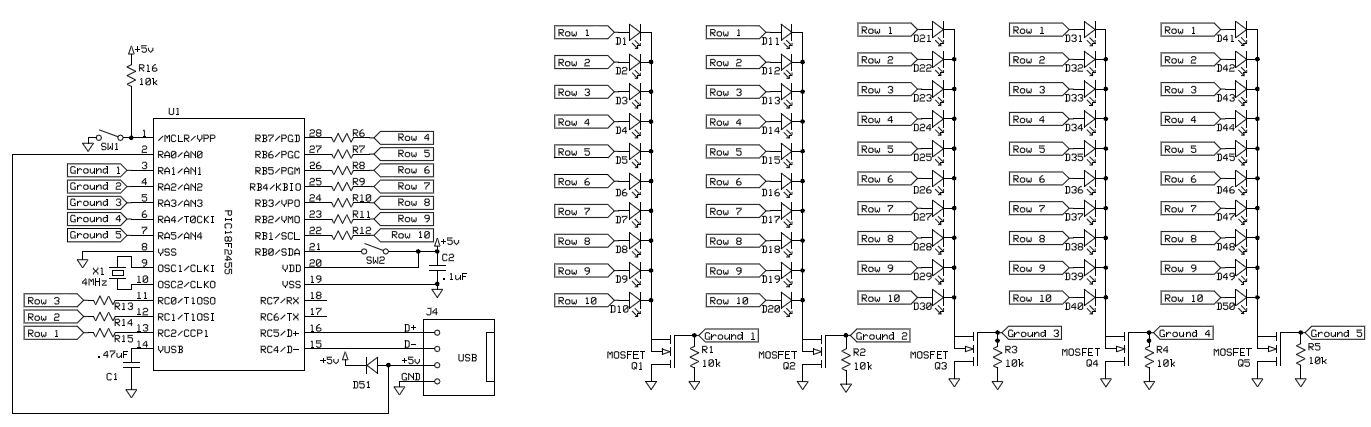
To control 40 LEDs using a single PIC 18F2455 microcontroller, the LEDs were organized into a configuration of four columns, each containing 10 rows of LEDs. Each LED in a column was connected to a separate pin on the...