
Bipolar stepper motor

The project involves utilizing a PIC microcontroller to control a bipolar stepper motor, which is commonly used in robotics and automation applications due to its precise positioning capabilities. The control of the stepper motor is achieved through an H-bridge circuit or specifically using the L298 dual H-bridge driver IC.
In this setup, the PIC microcontroller generates pulse-width modulation (PWM) signals that dictate the stepping sequence of the motor. The bipolar stepper motor requires alternating current in two coils to achieve rotation in either direction. The H-bridge or L298 allows the microcontroller to control the direction of the current flow through the motor coils, enabling precise control over the motor's movement.
The circuit typically includes the following components:
1. **PIC Microcontroller**: Acts as the central control unit, programmed to output the necessary signals for motor control.
2. **L298 H-Bridge Driver**: This IC contains two H-bridges, allowing it to control two motors or a single bipolar stepper motor. It can handle significant current and voltage, making it suitable for driving motors.
3. **Bipolar Stepper Motor**: The motor is characterized by its two coils, which are energized in a specific sequence to produce rotational motion.
4. **Power Supply**: Provides the required voltage and current to the L298 and the stepper motor.
5. **Control Circuitry**: This includes resistors, capacitors, and possibly diodes to protect the circuit and ensure stable operation.
The operation begins with the PIC generating a series of digital signals that correspond to the required stepping sequence. The L298 receives these signals and controls the power delivered to the motor coils. By adjusting the timing and sequence of the signals, the speed and direction of the motor can be controlled effectively.
It is essential to consider the specifications of the stepper motor and ensure that the L298 is capable of handling the motor's current requirements. Additionally, proper heat dissipation measures should be incorporated, as the L298 can generate heat during operation.
This configuration enables a robust and efficient system for driving a bipolar stepper motor, suitable for various applications in robotics and automation where precise control of movement is essential.miRover. This pages details how to use a PIC microcontroller and an H-bridge or a L298 to drive a Bipolar stepper motor 🔗 External reference
Related Circuits
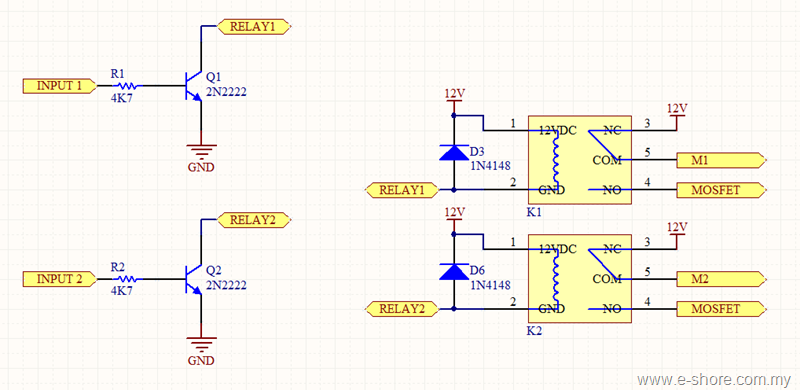
The circuit utilizes two sets of relays for each motor to switch the motor's direction, and one set of MOSFETs for each motor to control the motor's speed. The MOSFET and relay circuit will be divided into three parts...

This circuit has a long history, originating from an idea by Rich Piotter and later refined by Wilf Rigter and Bruce Robinson. The final result does not include the necessary motor drivers, which are typically H-bridge based, but presents...
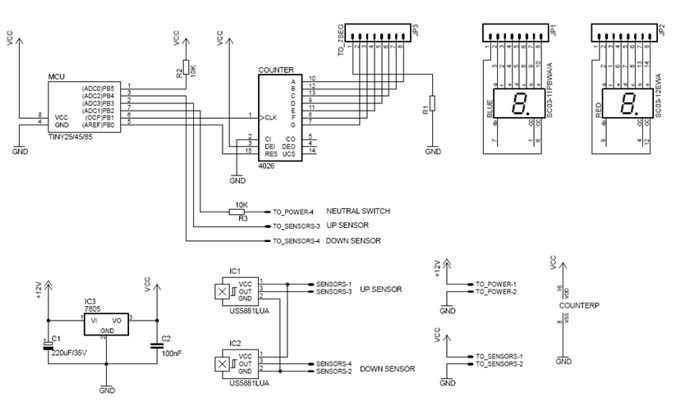
This is a new design for a universal gear indicator that can be fitted to any motorcycle as an aftermarket accessory. Its main advantage is that its operation depends entirely on the gear shift lever movement, instead of connecting...
The motor is rated at 6W, which corresponds to a current of 0.5 amps at a voltage of 12V. It is recommended to use a 12V DC power supply with a rating of 1A or higher. Any type of...
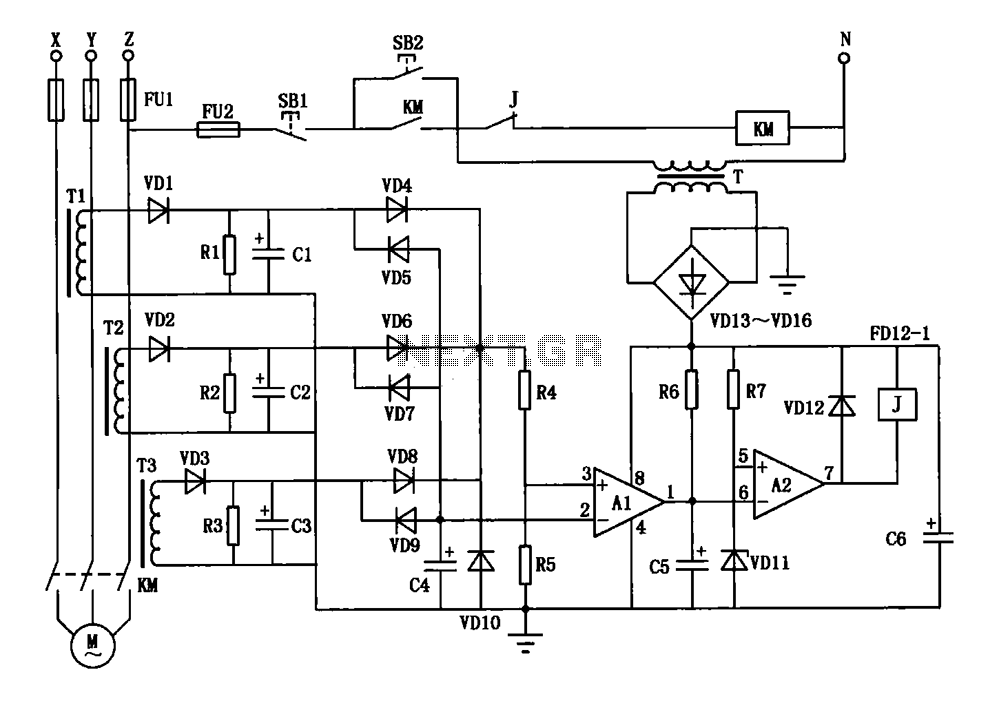
A current three-phase motor phase protection circuit is designed to detect three-phase current using homemade small current transformers T1, T2, and T3. The current signals are collected by rectifiers VD1, VD2, and VD3, while capacitors C1, C2, and C3...

The 3P10 circuit, illustrated in the figure, utilizes a bidirectional thyristor for control. The adjustment potentiometer RPi allows for modification of the minimum motor speed, while the adjustment potentiometer RP2 enables continuous variation of the motor speed, reaching up...