
Cellphone Operated Land Rover (Mobile Phone Controlled Robot)
")
The cellphone operated Land Rover project involves the design and implementation of a mobile robot that can be controlled remotely via a mobile phone. This innovative system utilizes a dual mobile phone setup where one phone serves as the controller and the other is mounted on the robot itself.
The robot is equipped with a microcontroller, typically an Arduino or similar, which interfaces with the mobile phone using a GSM module. The GSM module is responsible for receiving the control signals sent from the controller phone. When the user makes a call to the robot's phone, the microcontroller interprets the call signals to determine the commands for movement.
The robot's movement is facilitated by a motor driver circuit, which controls the motors based on the commands received. For instance, specific tones or frequencies can be used to denote forward, backward, left, and right movements. The microcontroller is programmed to recognize these tones and activate the corresponding motors accordingly.
Additionally, the robot may include sensors such as ultrasonic distance sensors for obstacle detection, enhancing its navigational capabilities. The integration of these sensors allows the robot to avoid collisions while following the user's commands.
Power supply considerations are crucial for the operation of both the mobile phone and the robot. A rechargeable battery pack is often used to provide sufficient voltage and current to the motors and the microcontroller.
In conclusion, the cellphone operated Land Rover project exemplifies the application of mobile communication technology in robotics, showcasing a user-friendly interface that allows for real-time control and interaction with the robot. This project not only demonstrates fundamental principles of electronics and programming but also opens avenues for further enhancements, such as incorporating video feedback or advanced navigation algorithms.CELLPHONE OPERATED LAND ROVER (MOBILE PHONE OPERATED ROBOT). In this project, the robot is controlled by a mobile phone that makes a call to the mobile phone attached to the robot.. 🔗 External reference
Related Circuits

The circuit indicates that the phone is in use by illuminating a red LED. When the phone is not in use, a green LED lights up. It operates without requiring external power and can be connected at any point...
This simple amplifier is designed to add a headphone jack to equipment that does not have this feature. The Headphone Buffer circuit board is compact (1.2" x 1.4"), allowing it to fit into even the smallest spaces, and its...
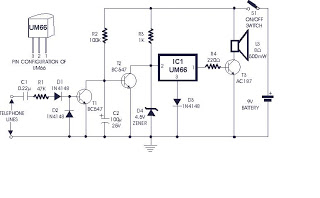
The incoming ring is detected by transistor T1 and the components connected to it. In the absence of a ringing voltage, transistor T1 is in the off state while transistor T2 is forward biased due to resistor R2 being...
The shunt-feedback configuration facilitates the straightforward integration of frequency-dependent networks, enabling a functional and discreet switchable tilt control (optional). When SW1 is in the first position, a gentle shelving bass boost and treble attenuation occur. The central position of...
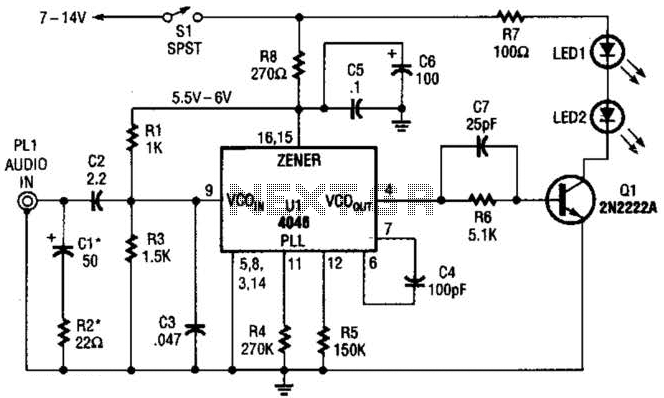
The transmitter for the wireless headphones is constructed using a CD4046 CMOS phase-locked loop, which is paired with a driver transistor and a set of infrared LEDs. While the CD4046 contains two phase comparators, a voltage-controlled oscillator (VCO), a...
When driving at night and approaching another vehicle, traffic regulations dictate that the distance between the two vehicles should be maintained. This is achieved by alternately activating and deactivating the high beams, while utilizing either the wide lights or...