
gps altimeter

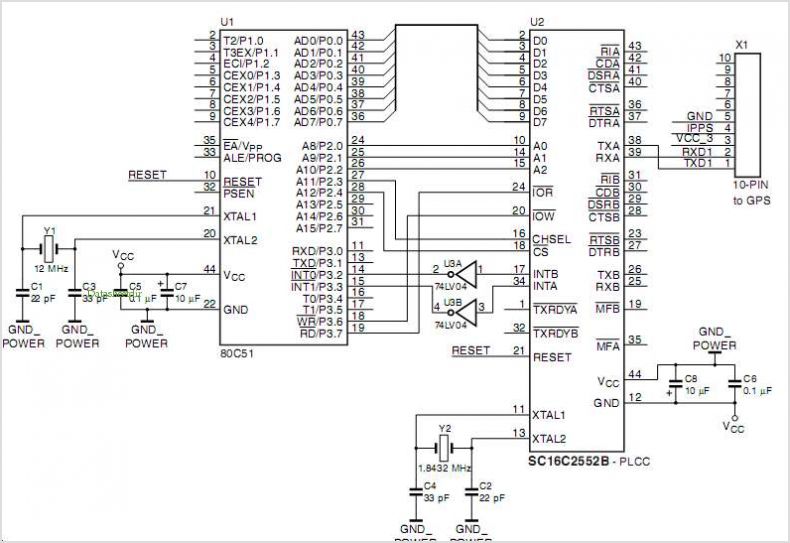
The electronic schematic of this device integrates several key components to facilitate its operation. The Picaxe 18X microcontroller serves as the central processing unit, controlling the overall functionality and data processing of the system. It is programmed to handle incoming GPS data, interpret the NMEA sentences, and extract relevant altitude information from the data stream.
The GPS module interfaces with the Picaxe microcontroller through a serial communication link, operating at a baud rate of 4800. This allows the microcontroller to receive real-time position and altitude data. The GPS module is powered by the same supply as the microcontroller, ensuring synchronized operation during the rocket's ascent and descent.
Data logging is accomplished using a 24LC512 EEPROM, which is interfaced with the microcontroller via the I2C protocol. The EEPROM provides sufficient storage capacity to log multiple altitude readings throughout the flight. The microcontroller writes altitude data to the EEPROM at predetermined intervals, ensuring that data is captured even if the GPS temporarily loses satellite lock.
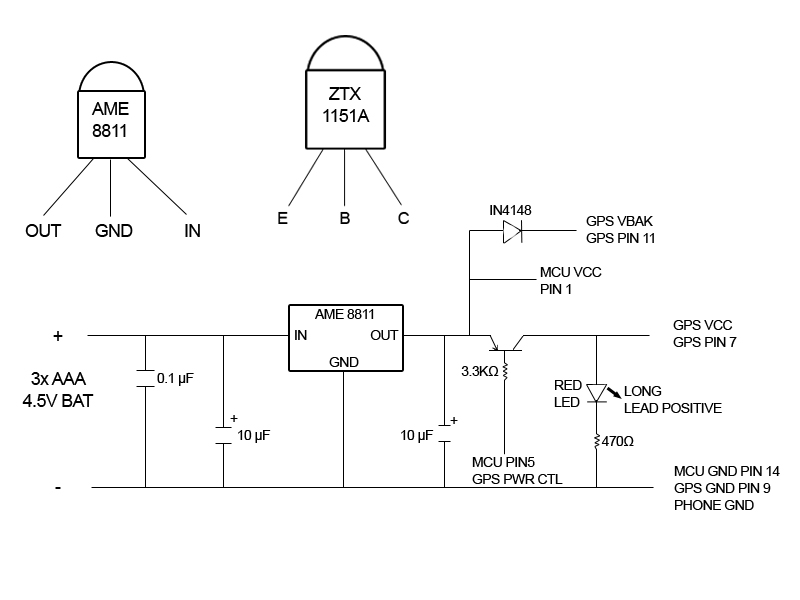
The design includes power regulation circuitry to ensure that both the microcontroller and GPS module operate within specified voltage ranges. This may involve the use of linear voltage regulators or DC-DC converters, depending on the power source used during the launch.
To enhance reliability, the circuit may include decoupling capacitors near the power pins of the microcontroller and GPS module, filtering out noise that could disrupt operation. Additionally, a reset circuit may be implemented to ensure that the microcontroller can recover from any unexpected faults during operation.
Overall, this device represents a compact and efficient solution for high-altitude rocketry data logging, with a focus on capturing and storing critical flight data for post-launch analysis.This device was created in a hurry for the USC Rocket Propulsion Lab, the student-run high-altitude rocketry effort at USC. I think I soldered it together a day or two before the launch, and then programmed it on a laptop on the car trip out to the desert.
It uses a Picaxe 18X microcontroller and accepts a GPS NMEA data stream at 4800 baud (I thin k ). It pulls out the altitude and logs it to a 24LC512 external EEPROM, and then reads it back when you are done. You can clearly see where the GPS device briefly lost satellite lock on the way down. The rocket hit a final altitude of about 18, 400 feet! Its take-off was also the single loudest thing I have ever heard in my life. If you ever get a chance to watch a large rocket launch, I highly recommend it! 🔗 External reference
Related Circuits
In this project, an embedded system is designed for tracking and positioning vehicles using the Global Positioning System (GPS) and Global System for Mobile Communications (GSM). The AT89S52 microcontroller interfaces with various hardware peripherals. The system continuously monitors a...
The MAX2659 low-noise amplifier (LNA) is designed for GPS, Galileo, and GLONASS applications. Manufactured using Maxim's advanced SiGe process, the device achieves a gain of 20.5 dB and an ultra-low noise figure of 0.8 dB, while maximizing the input-referred...
The tracker is straightforward to construct on a perfboard. A basic one-pad-per-hole perfboard and 26-gauge wire are recommended, although 30-gauge wire may be more suitable. All electronic components can be sourced from Mouser Electronics, while Radio Shack offers the...
The APX9132 integrated circuit is an ultra-sensitive, pole-independent Hall-effect switch featuring a latched digital output. It operates within a voltage range of 2.5 volts to 3.5 volts, and its unique clocking scheme reduces average power consumption. The output activates...
The VNGBOX microcontroller must generate a precise, high-resolution, and low-noise DC control voltage to accurately steer the reference oscillator phase. Any noise on this signal can introduce noise to the reference, and any non-linearity, particularly unexpected steps in the...

The Yaesu FT-7900E radio's power status can be utilized to manage the power status of the GPS and Tracker without requiring additional cabling. If implemented correctly, this would enable the radio's Auto-Power-Off feature to also turn off the GPS...