
infrared or ultrasonic

For the insect robot project, the design can be structured around the selected obstacle detection method, either infrared or ultrasonic. If infrared is chosen, the circuit can be designed using a 555 timer in astable mode to generate a modulated IR signal. The IR LED will emit the signal, while the TSOP17XX receiver will detect the reflected signal from obstacles within the specified range. The output from the TSOP can be fed into a microcontroller or a comparator circuit to determine the presence of an obstacle.
In contrast, if the ultrasonic method is selected, the circuit will include an ultrasonic transducer pair. The transmitter will emit sound waves, and the receiver will listen for echoes. The time taken for the echo to return can be calculated to determine the distance to an obstacle, using a microcontroller to process the signals and control the robot's movements accordingly.
Both approaches will require careful consideration of power supply requirements, component placement, and potential interference from environmental factors. Additionally, programming the microcontroller will involve creating algorithms for obstacle detection and avoidance, ensuring that the robot can navigate effectively while maintaining its walking sequence. The choice between IR and ultrasonic sensors will ultimately depend on the project's specific needs, budget constraints, and the desired reliability of the obstacle detection system.Currently working on an insect robot project. my first robotics project! I`m looking into 2 methods of detecting obstacles i. e. IR and Ultrasound. I cannot seem to choose at this point in time! Can someone give me some guidelines as to which is more reliable and accurate. range is not really a problem. there are lot of limitations in infrared sensors like cannot be used in sun coz of ambient light interference etc. where as ultrasonic sensors works on sound waves so no problem in detecting obstacle in any case. Infrared will need Tx and Rx placed at diferent points. u can only get the idea of interception at some fixed line angle etc. cause as ajay said they are not reliable. plus they can come from almost any source. i beg to differ on this statement, a highly reliable obstacle sensor can be made with Ir, the fact that even the most modern entertainment gadgets( TV, Music systems, DVD, LCD TVs etc) use Ir technology for remotes speaks about its reliability. at first the TV remotes used ultrasonic technology, but later shifted to Infrared also the fact that Light travels faster than sound helped this transition.
at first the TV remotes used ultrasonic technology, but later shifted to Infrared also the fact that Light travels faster than sound helped this transition. yes, that might have also fueled the change, the TV viewer had to strike once on aluminum pipe for TV ON and twice for volume up and thrice for OFF all had to be at correct intervals, this was cumbersome and the designers were desperate to find better alternative and settled on Ir.
when it comes to component count, IR uses less components ( 555, Ir Led, Tsop17XX, 3 resitors, a cap) but Ultrasonic requires a lot more ICs and discrete components and requires careful alignment. since the OP wants a obstacle detector for his Insect robot, Ir can also be used (low parts count, low budget) but when it comes to saving a Blind man`s life, surely Ultrasonic method can/should be used.
OK Shyam, I will explain what I`m doing! Well you know I`m building an insect robot i. e. it will have 6 legs and I`m going to implement a tripod walking sequence where 3 legs will always be on the ground at any given time. I need to give this robot some sort of ability to sense obstacles in it`s path and provide a method to make it avoid the obstacle.
I have searched around and found that I would use one of 2 methods i. e. IR or ultrasonic. I scrapped the idea of having a touch sensor because that seems too trivial and the robot would already be right in front of the obstacle making it seem like a blind robot with a walking stick Anyway, IR and ultrasonic have their own advantages and disadvantages. I`m looking to detect the obstacle at a distance of about 1 meter and gradually implement a turning sequence while it moves forward so that it will eventually avoid the obstacle.
I`m looking also to minimize design cost although I have a budget of R700 (Rands. I`m from South Africa :-) ). I have bought a couple IR LED`s and receivers and also an ultrasonic transducer pair. Which of these (IR or ultrasonic) is easier to implement By the looks of things, it`s IR. I want something that will work without being affected by the environment and since a modulated IR wave can do this, then it`s one up for IR again. for providing valuable info and helping me to decide between IR or ultrasonic, the cost of U-sonic pair was equal to my total project budget of Rs.
600 and Ir sensor could be built for 10% of the project cost (Rs. 60). Ir makes more sense to me. This is the first time i am thinking good about IR. u also made me think about making aproject on IR and check its feasibility in practical environment. 🔗 External reference
Related Circuits
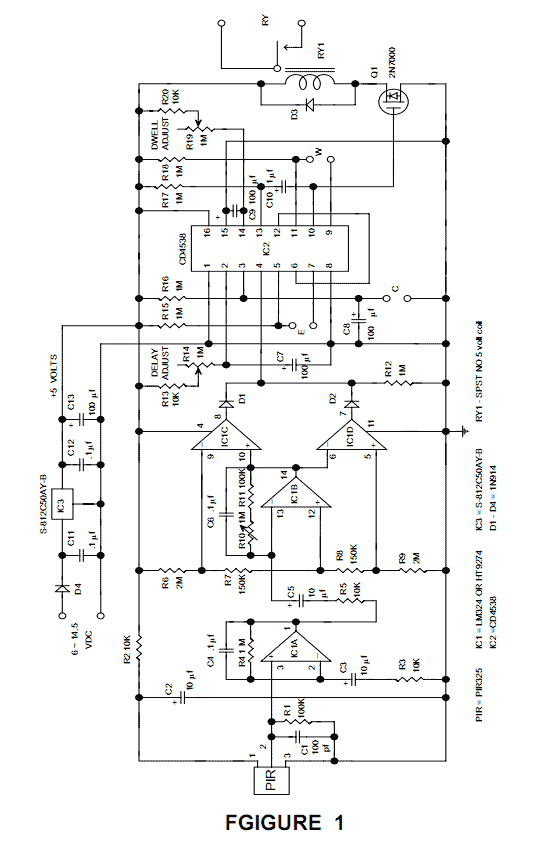
The GLMDA is designed to detect the motion of a human or animal both in daylight and at night and to provide a normally open relay output that can be used to activate many types of loads. The GLMDA...
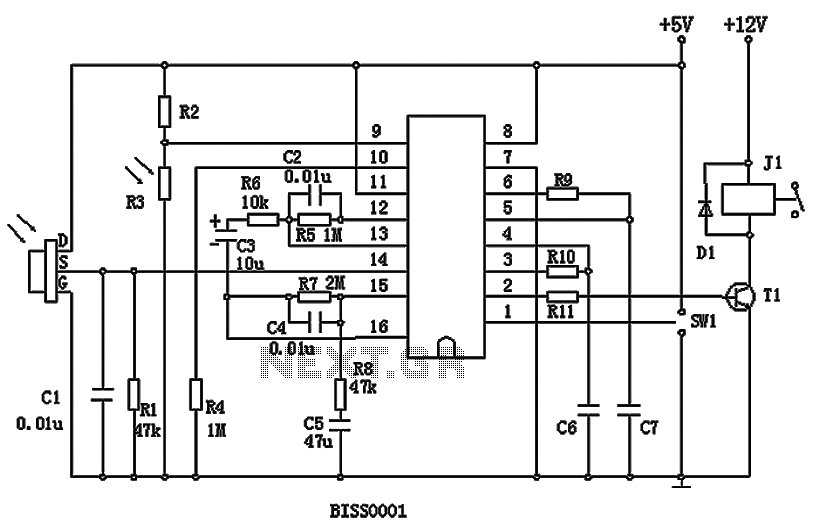
BISS0001 is a high-performance integrated circuit designed for sensor signal processing. It is used in conjunction with pyroelectric infrared sensors and requires only a few external components to function as a passive pyroelectric infrared switch. This circuit can automatically...
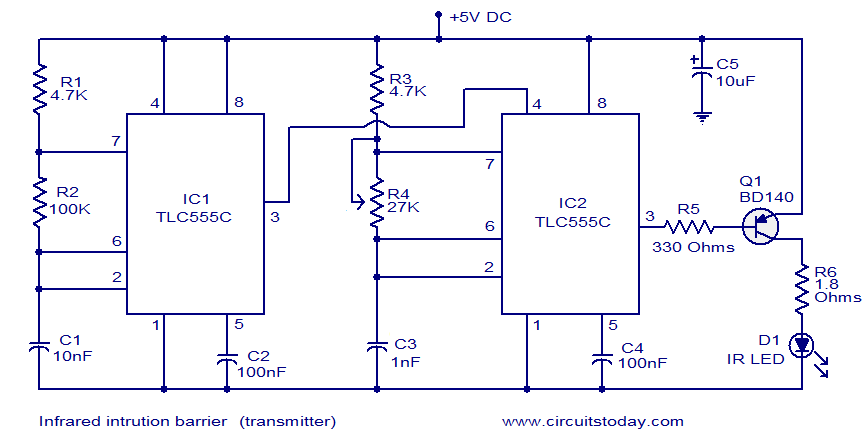
The circuit diagram of an infrared intrusion detector is presented. This system triggers an alarm when a trespasser interrupts the invisible infrared beam. It consists of a receiver circuit and a transmitter circuit. The transmitter circuit utilizes two TLC555...
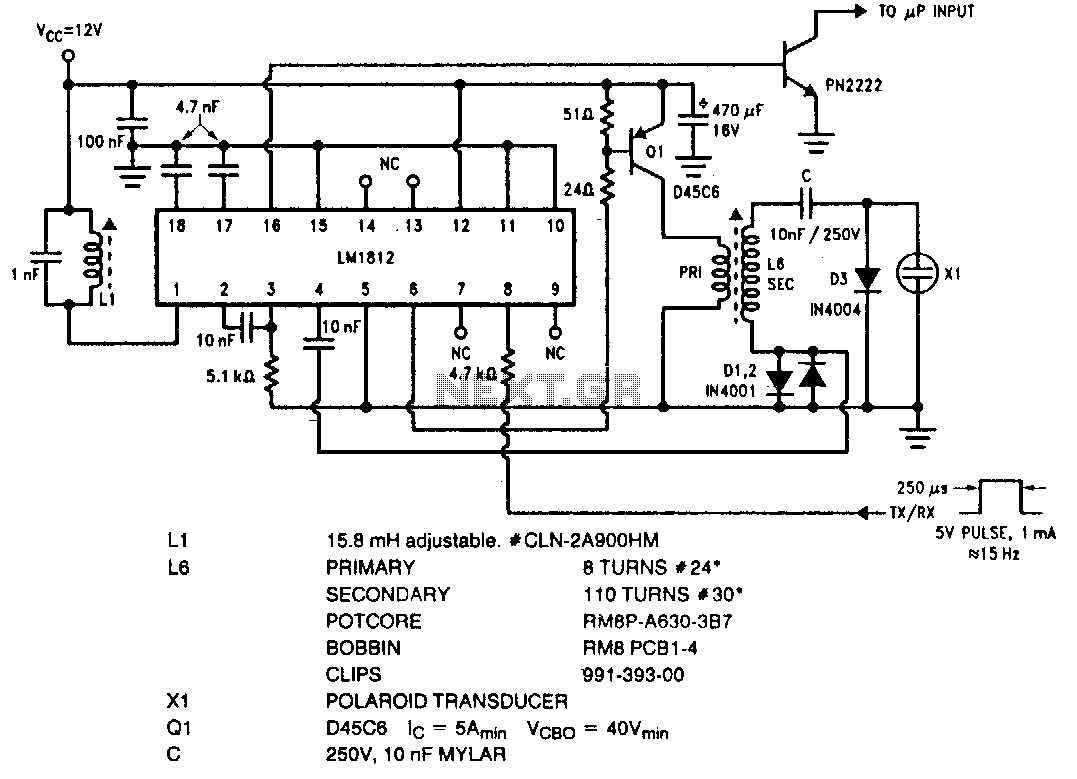
The LM1812 is a complete ultrasonic transceiver integrated circuit designed for various pulse-echo ranging applications. The chip functions by transmitting a burst of oscillations through a transducer, which is then used to listen for a return echo. If an...
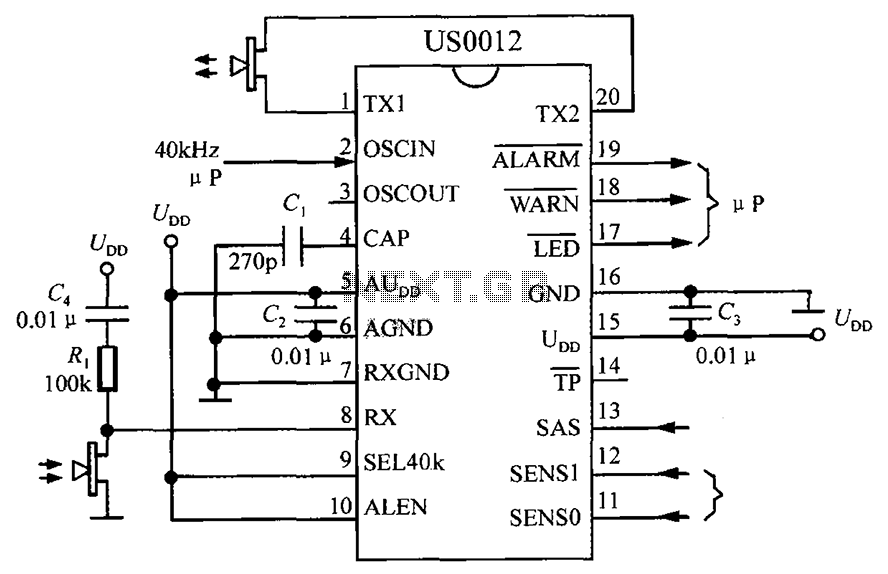
The circuit consists of the US0012 ultrasonic interference detection system, as illustrated in the accompanying figure. When the SEL40k termination is set to high, it selects a clock frequency of 40kHz. The US0012 module can perform several tasks: it...

The following circuit illustrates a simple infrared sensor module circuit diagram. Features include a simple infrared sensor module and flame detection. The simple infrared sensor module circuit operates by utilizing an infrared (IR) transmitter and receiver pair. The IR transmitter...