
Line Following Robot Sensor

The line-following robot sensor operates using infrared light to detect the presence of a surface or line beneath the robot. The sensor emits infrared light, which reflects off the surface and returns to the sensor. This principle allows the sensor to determine whether the robot is positioned over a line or a contrasting surface.
The key components of this system include an infrared LED, a phototransistor or photodiode, and associated resistors and capacitors for signal conditioning. The infrared LED emits light, and when it hits a surface, some of that light is reflected back to the phototransistor. The intensity of the reflected light varies depending on the color and texture of the surface. For example, a dark line on a lighter background will reflect less infrared light compared to a lighter surface.
The output from the phototransistor can be processed by a microcontroller, which interprets the signals to determine the robot's position relative to the line. The microcontroller can then adjust the robot's movement accordingly, allowing it to follow the line accurately.
In terms of circuit design, the sensor can be powered with a low voltage supply, typically between 3V to 5V, making it suitable for integration with various microcontrollers. The output signal from the phototransistor can be connected to an analog input pin of the microcontroller for continuous monitoring or can be configured to trigger a digital input when a certain threshold is crossed, indicating the presence of a line.
This sensor is ideal for applications in autonomous robots, such as those used in line-following competitions or automated guided vehicles (AGVs) in industrial settings. Its small size and simple design make it easy to integrate into various robotic platforms, enhancing their functionality and performance in navigating predefined paths.This Line Following Robot sensor or surface scanner for robots is a very simple, stamp-sized, short range (5-10mm) Infrared proximity detector wired aroun.. 🔗 External reference
Related Circuits
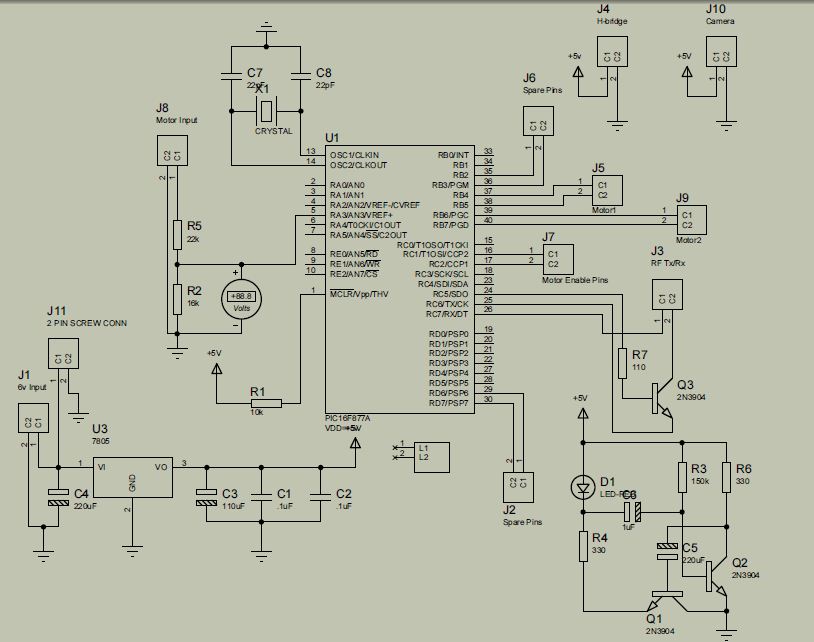
The project is developed by Team Stark, with Gilbert as the leader and team members Martin and Janssen. The tasks have been divided into three parts. The first part includes camera control, login database, installer, and network setup, which...
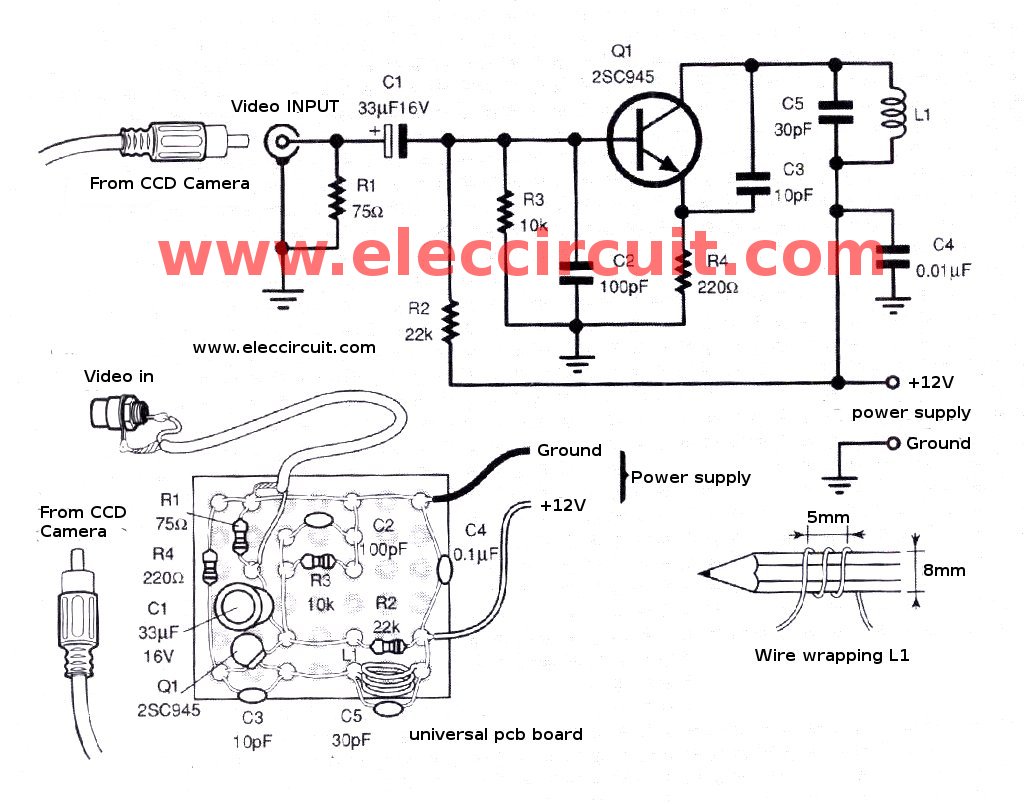
The CCD camera sensor is a very useful device that is compact in size while providing excellent quality. It can be easily installed with a television through the video input terminals, allowing for the transmission of modulated video signals...
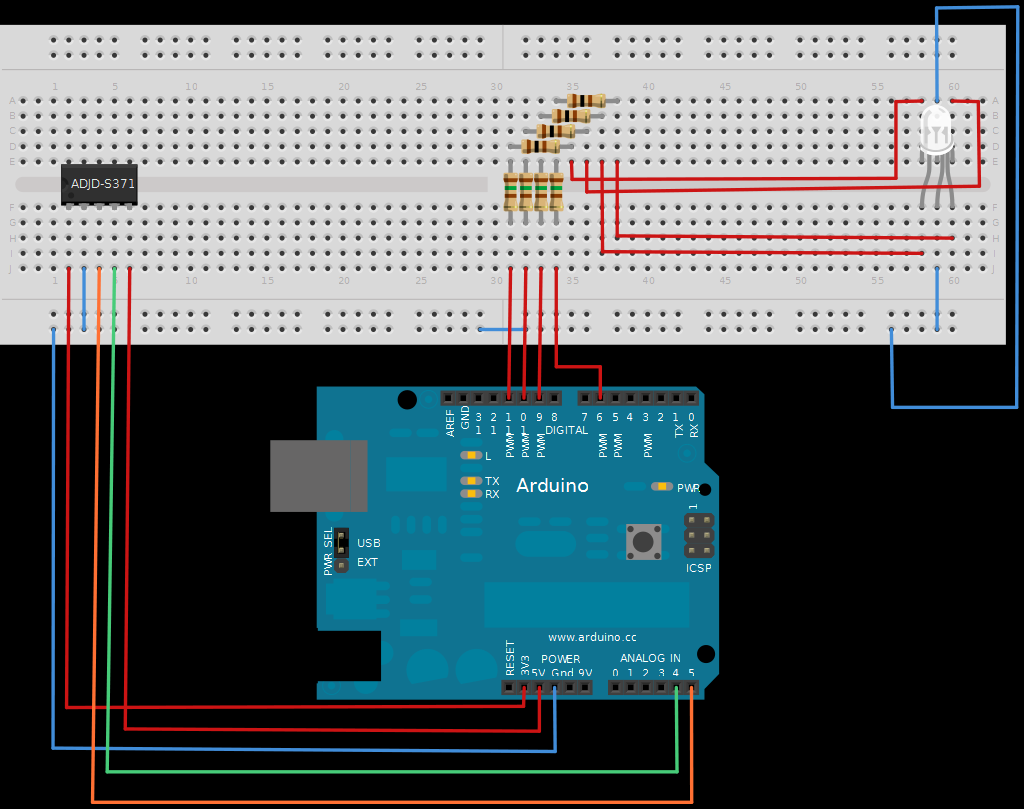
The next board presented is the ADJD-S371 Color Light Sensor Evaluation Board from SparkFun. This board emits light and analyzes the reflected color spectrum. It can be controlled via I2C, while the sleep and xclk pins were not utilized...
The following circuit illustrates a BC 547 transistor used in a garage alarm sensor circuit diagram. Features include a simple single-zone burglar alarm circuit. The BC 547 transistor is a popular NPN bipolar junction transistor (BJT) that is frequently used...
This project involves the design of an air-filter sensor intended for use in home heating and cooling systems. The project encompasses conceptual design, analysis, implementation, testing, and modifications. Initially, the study focuses on comparing air quality and power consumption...
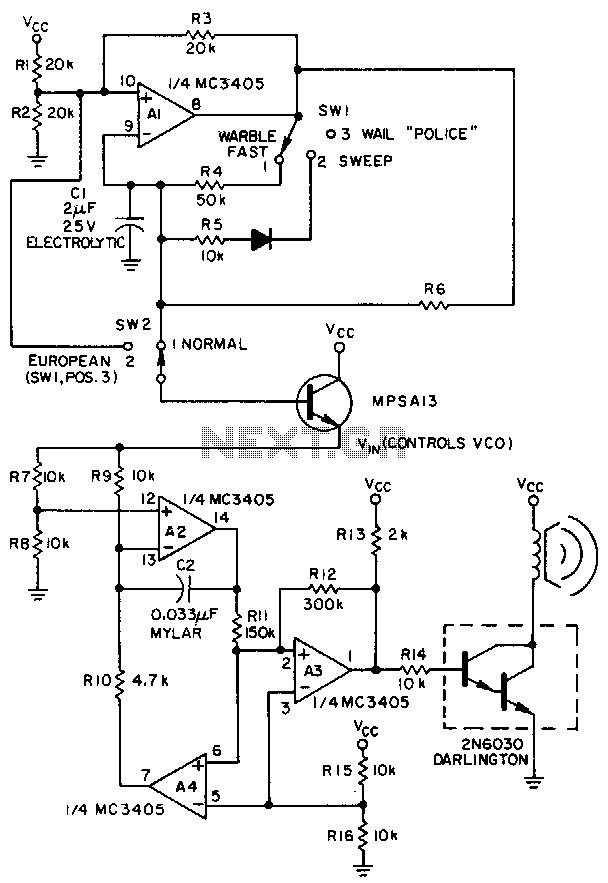
A low-frequency op-amp oscillator and a voltage-controlled oscillator (VCO), both configured using a single MC3405 dual op-amp and dual comparator, are the primary components in a siren circuit capable of producing various warbles and wails, or functioning as an...