
LINUSBot - Line Follower Robot using Arduino

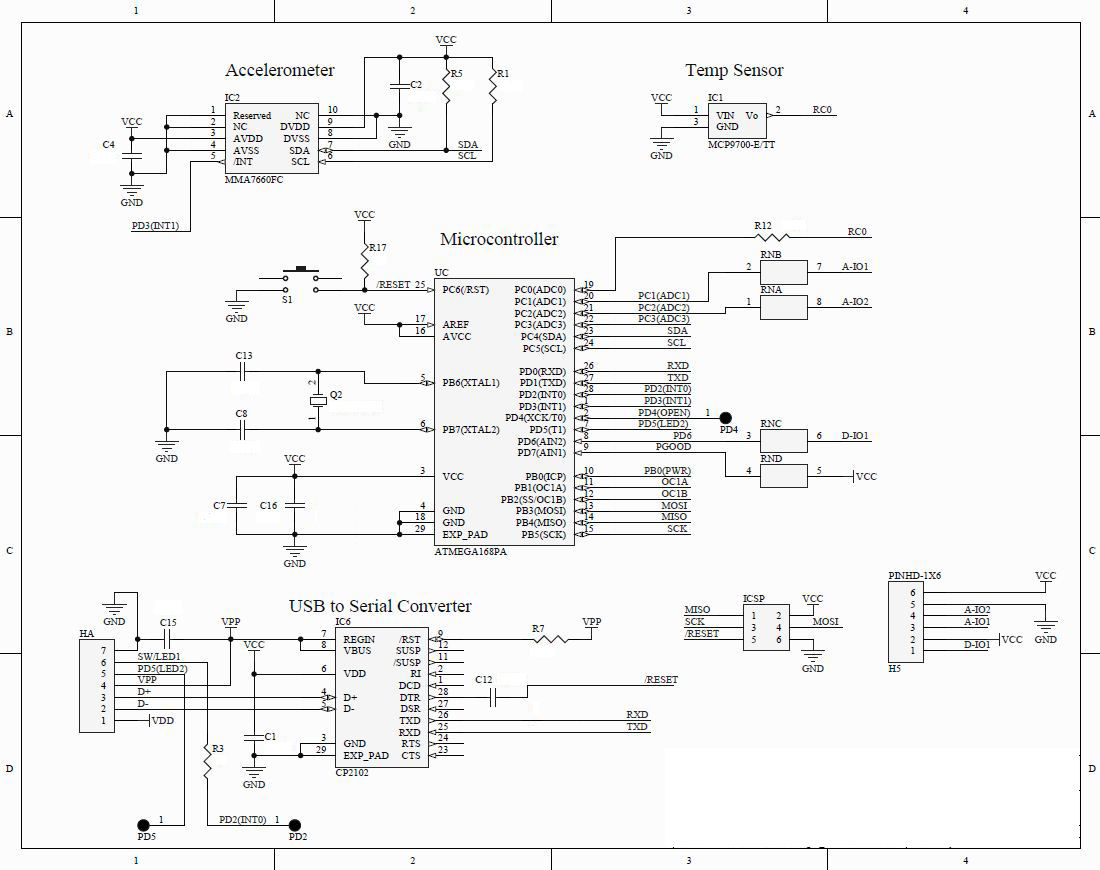
The robot's navigation system utilizes the QTRx8RC infrared sensor array to detect the presence of a black line on the ground. The sensors function by emitting infrared light and measuring the reflected light to distinguish between the black line and the white surface. When the robot is aligned with the black line, the sensors will register high reflectance from the black surface, allowing the robot to proceed forward without corrective action.
When the robot deviates from the black line and encounters a white area, the sensors will detect a significant drop in reflectance. The robot's control algorithm then analyzes the readings from the sensors to determine the direction of corrective action required. If the sensors on one side (e.g., left) detect a white surface while those on the other side (e.g., right) still detect black, the robot will steer towards the side with the higher reflectance to realign itself with the black line.
The QTRx8RC sensor array consists of eight individual sensors, but in this application, only five sensors are actively used, specifically the QRE1113GR models. This selection allows for a compact design while maintaining effective line detection capabilities. The digital output of these sensors simplifies integration with microcontrollers, enabling rapid processing of sensor data. The Pololu library provides pre-written functions to facilitate sensor management, allowing for straightforward implementation of line-following algorithms.
The overall design ensures that the robot can navigate effectively along predefined paths, making it suitable for various applications, including educational projects, automated delivery systems, and robotic competitions. The combination of reliable sensor technology and efficient control algorithms contributes to the robot's ability to maintain its course with minimal deviation.In case the robot being on the black line, it will always go ahead, and in the case of out of line and fall into a white area, it will determine whether to correct to the left or right, and thus remain on the black line. The sensors that will be used is the array infrared sensor Pololu (also called reflectance sensors) QTRx8RC, that consists of ei
ght sensors (only five are used) QRE1113GR. This array has a digital output and can easily be managed using the appropriate library of Pololu, for determine the position of the line relative to the sensors. 🔗 External reference
Related Circuits
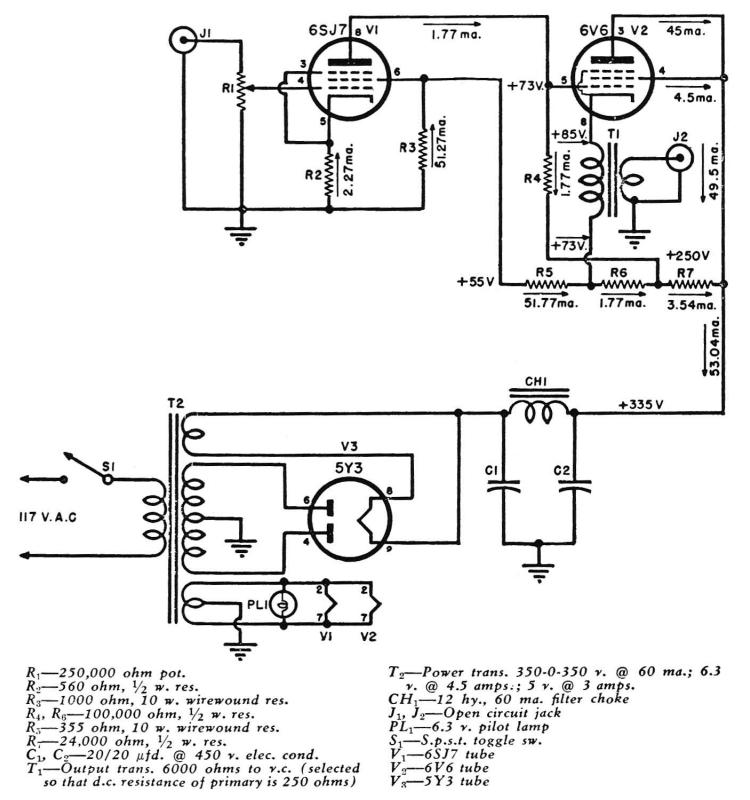
A Direct-Coupled 6V6 Tube Amplifier with Cathode Follower by Raymond H. Bates from Radio & Television News magazine, November 1949. The Direct-Coupled 6V6 Tube Amplifier is designed to utilize a 6V6 vacuum tube, which is known for its warm sound...
With this simple project, you can have balanced lines too, simply adapting the unbalanced inputs and outputs of your hi-fi gear to become balanced, and then back to unbalanced at the other end. You can even be extra cunning,...
Following a highly successful Kickstarter project and over a year of development, HexBright, described by its creator as the world's first open-source Arduino flashlight, is now in production with initial shipments planned for December. HexBright, which was discussed in...

A long time ago, when telephones were simple and reliable from an electrical standpoint, telecom operators installed surge protection on all telephone lines exposed to storm risks. Paradoxically, with the advent of delicate and expensive equipment such as electronic...
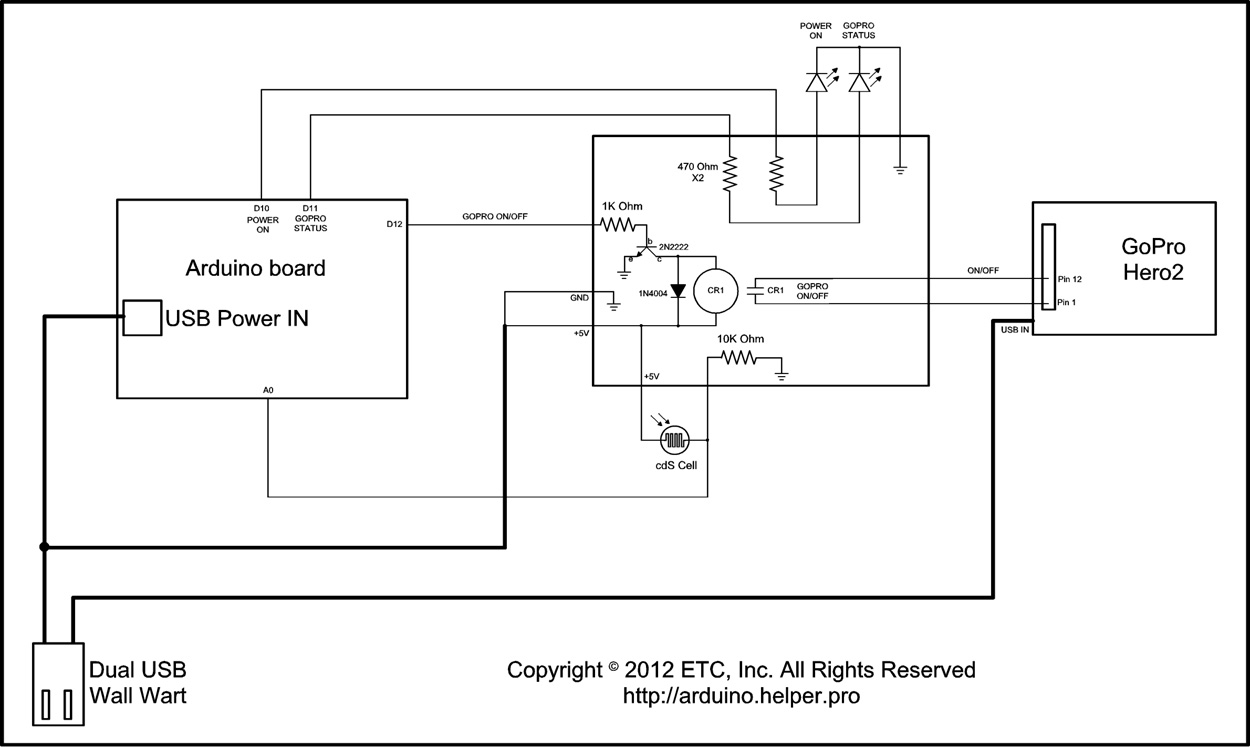
The project involves creating a time-lapse photography setup using a GoPro Hero2 camera to capture images of a race car chassis fabrication project at 20-minute intervals. Although the GoPro has a built-in time-lapse feature, it cannot manage long intervals...
A voltage-to-frequency converter can be constructed using the LM231/331 chip, making it a cost-effective solution for applications such as analog-to-digital conversion and frequency-to-voltage conversion over extended periods. The LM231/331 series of voltage comparators can be effectively utilized to design a...