
Sensors and Sensing

The Lego touch sensor operates as a simple contact switch that is held open by a spring and connected in series with a load resistor. Mechanical switches like this tend to bounce when activated, complicating the detection of distinct presses. To avoid counting these bounces, mechanical switches are often debounced using additional circuitry (such as a capacitor across the switch contacts) or software filtering techniques that ignore subsequent transitions shortly after an initial press. The RCX and legOS software effectively condition touch sensor data for reliable operation. The Lego light sensor, while also reliable, presents more complex challenges due to the physics involved in light sensing. For instance, in a demonstration involving a light-following robot, the Lego light sensor detects light reflected from a surface, enabling the robot to follow a light source. Additionally, the light sensor features a built-in LED, allowing it to function independently of external light sources. This capability enables applications such as color differentiation on surfaces, facilitating various tasks from line following to object recognition.
Understanding the functionality of the Lego light sensor requires knowledge of how light of different wavelengths is transmitted, absorbed, and reflected. Human vision operates within the visible light spectrum, while the Lego light sensor's phototransistor exhibits peak sensitivity around 800 nm, placing it in the infrared range. The complexity of light sensing is compounded by the reflective properties of various surfaces, which may absorb certain wavelengths while reflecting others. Materials can behave either as specular reflectors, which reflect light like mirrors, or as diffuse reflectors, which scatter light in multiple directions. The characteristics of the phototransistor, including its response to light intensity, are managed by the RCX hardware and software, simplifying the user's interaction with the sensor. The sensor's plastic dome lens offers a wide angular view, but for directional applications, it may be beneficial to restrict the angle of light entering the sensor using tubes or other structural arrangements.
In summary, the integration of these sensors into robotic systems requires a nuanced understanding of their operational principles and the challenges associated with data interpretation, enabling the development of effective robotic applications.You "see" colors, geometry, distance, spatial continuity and discontinuity, motion, connectedness and adjacency. These notions are built into the ways in which you experience and think about the world. You interpret the information returned to your senses through a rich model of the world. The robots you build will not have such a model unless you supply it. Moreover the simple touch, light and rotation sensors that your robots will use to sense the world are very different from your tactile, visual and proprioceptive sensors and, hence, your intuitions and models may not be appropriate to apply to interpreting Lego sensors. The sensors designed for the Lego Mindstorms RIS are fairly well behaved as sensors go. The Lego engineers did a good job of trading accuracy for simplicity and reliability of use. Of course, some would say that sensing problems are rarely due to the sensors themselves; they arise primarily due to problems in interpreting the data returned by sensors.
Others might quip that a good sensor should be designed to return unambiguous data, but that misses the point. Sensing is all about measuring physical quantities often termed signals (e. g. , reflected acoustic energy in the case of sonar) and interpreting these measurements in order to draw conclusions about other physical quantities (e.
g. , the distance to nearby physical objects that might constitute obstacles to a mobile robot). Any signal that obscures the signal you want to observe is referred to as noise. Ambiguity refers to there being more than one interpretation of a given signal. Ambiguity and noise are just part of the sensing game. Consider the Lego touch sensor; this device consists of nothing more than a contact switch held open with a spring and wired in series with a load resistor. Simple mechanical switches such as the Lego touch sensor tend to bounce when pressed. The signal we want to detect corresponds to distinct pressings of the switch; the bounces that arise as a consequence of mechanical and electrical chattering of the contacts are considered noise.
Click on the graphic below to learn more about bouncing in mechanical switches. In order to avoid counting the bounces when a switch is pressed, e. g. , on a computer keyboard, mechanical switches are generally debounced either by adding additional circuitry (e. g. , a capacitor across the switch contacts) or by employing some sort of filtering subroutine which, when it detects a voltage transition, it ignores subsequent transitions for a short period following the initial transition assuming that the later transitions are due to bounces and not distinct pressing events.
The RCX and legOS software do a good job of conditioning touch sensors so that they are reasonably well behaved. The Lego light sensor is also well behaved as such sensors go but the physics of sensing light levels is much more complicated and not surprisingly so is the task of interpreting the values returned by light sensors.
Let`s reconsider the light-following robot that we demonstrated during the lecture on Braitenberg`s vehicles. That robot made use of a Lego light sensor to sense the light produced by a flashlight and reflected off the carpet; the robot used a light sensor aimed at the floor to follow the spot of light cast by the flashlight.
The Lego light sensor can also be used without an external source of light as it has an LED that provides a source of light. Using it`s self-contained light source, a downward pointing Lego light sensor can be used to distinguish between the colors painted on the horizontal surface of a playing field designed for robot competition.
Variations on this basic idea give rise to robots that read marks on horizontal surfaces for a variety of applications from game playing and line following to object recognition. This wide variety of applications makes the Lego light sensor one of the most interesting to work with.
In picking projects, it`s more productive to think first in terms of what you can do with the available sensors rather than start with an application and work backwards to how the available sensors would support that application. In order to understand how the Lego light sensor works we have to consider how light of various wavelengths is transmitted, absorbed, reflected and converted into other forms of energy.
Humans see in the the so-called visible light region of the electromagnetic spectrum. Click on the graphic below to learn more about the electromagnetic spectrum. The phototransistor used in the Lego light sensor appears to have its peak sensitivity at around 800nm. Here is a graph of the sensitivity of a similar phototransistor as a function of wavelength measured in nanometers (1000 nanometers = 1 micrometer (micron) so that 800nm =.
8mm) This means the peak sensitivity for the Lego light sensor is in the infrared end of the spectrum. The human body radiates most strongly in the infrared range around 10 microns while the portion of the infrared spectrum used by TV remote control devices and the RCX tower is called near infrared (longer wave lengths) and does not feel warm at all.
Human daylight vision works best in the blue-green region of the spectrum where the sun`s energy is at a maximum. The light from a flashlight bulb is typically broad spectrum and tungsten bulbs tend toward a maximum at the red end of the spectrum.
The issue of the frequency response of sensors and the frequency spectrum of sources is complicated still further by the fact that in many cases we`re interested in the light reflected from surfaces that are not perfectly reflective (they absorb some frequencies and reflect others) and for which the angle of incidence is often different than the angle of reflection. Some materials tend to behave like mirrors (they are said to be specular) and others tend to scatter light in all directions (they are said to be diffuse).
Click on the following graphic to learn more about the physics of reflected light. There are other complications that concern the characteristics of the phototransistor such as its response (current) as a function of the light falling on the surface of the sensor (irradiance). However, you are largely sheltered from these complications by the hardware and software of the RCX. There are some other physical characteristics of the Lego light sensor that you should be aware of. The phototransistor used in the Lego sensor is enclosed in a plastic dome or lens which gives it a wide angular view.
If you want to use the sensor as a directional finder you will probably want to use a tube or an arrangement of Lego bricks to restrict the angle of light falling on the sensor. This can be important when, for example, you want to use the light sensor to aim a robot toward a light source.
Here is the circ providing the neces an application. 🔗 External reference
Related Circuits
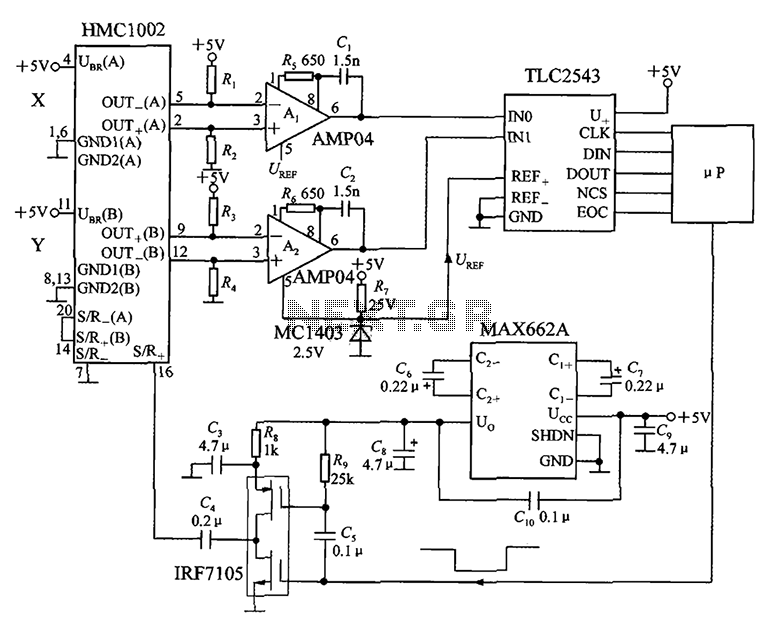
An application circuit for a biaxial magnetic field sensor is presented. This circuit utilizes the HMC1002 biaxial magnetic sensor along with two AMP04 amplifiers (A1, A2) to simultaneously measure magnetic fields in both the X-axis and Y-axis directions. The...
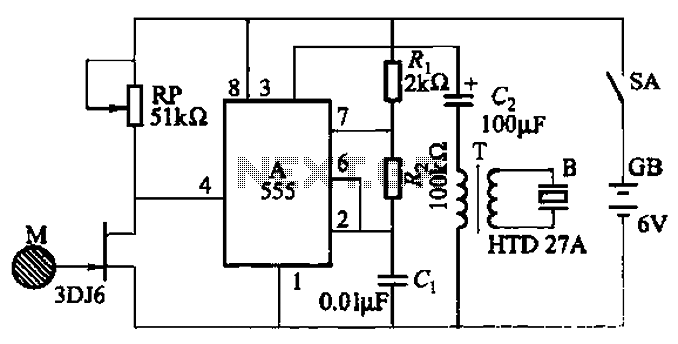
The circuit utilizes a 555 integrated circuit (IC) configured as a non-stable multivibrator. When a sensor detects proximity to a high-voltage electrified body, a piezoelectric ceramic sheet generates an alarm. Additionally, when in proximity to a high-frequency electric field,...
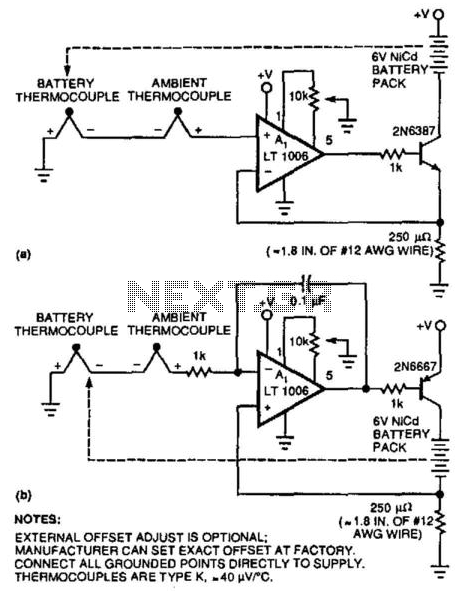
Two simple circuits enable NiCad battery charging based on the temperature differences between the battery pack and the ambient temperature. This method allows for fast charging by sensing the temperature rise that occurs after charging is complete when the...
This two-part article explains the utilization of a simple voltage divider circuit incorporating a thermistor to obtain high-accuracy temperature readings across a wide range of measurements. The first part focuses on the circuit design and explores various methods for...
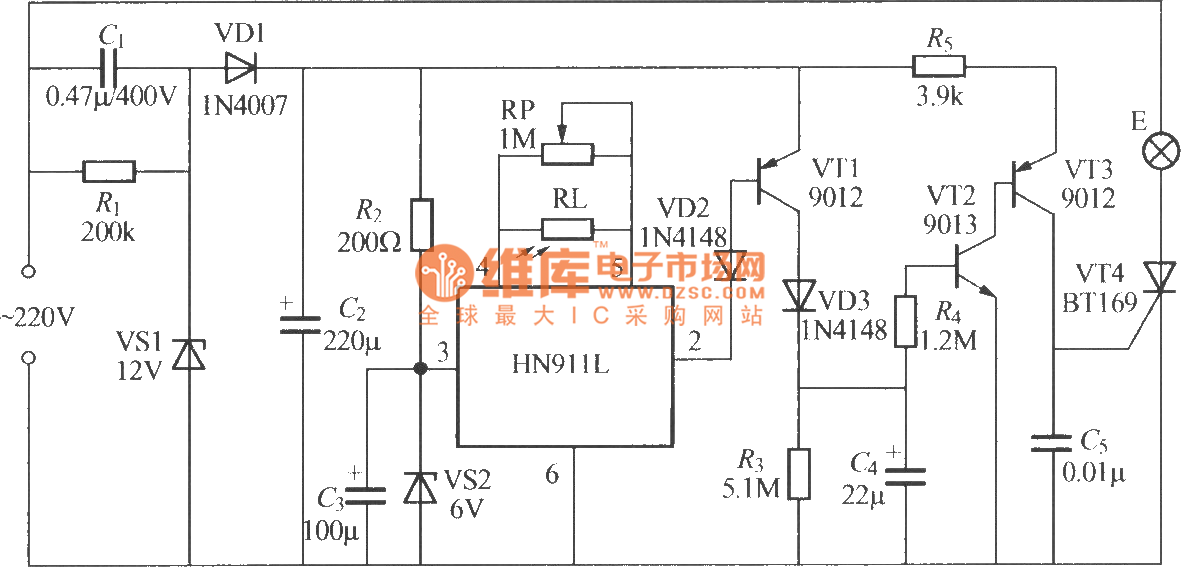
The figure illustrates an automatic light sensing system utilizing the HN911L pyroelectric infrared detection module. The HN911L incorporates high-sensitivity infrared sensors, a passive infrared (PIR) sensor, amplifiers, a signal processing circuit, and an output circuit. This module is capable...
Capacitive sensors are utilized in various devices, ranging from consumer electronics to industrial and process control systems. Touch buttons are increasingly integrated into lamps and dimmers, while motion detectors can sense minute changes in deflection. Hygrometers measure humidity levels,...