
Appetizer Solar-Powered BEAM Robot
The described robot employs a BEAM (Biology, Electronics, Aesthetics, and Mechanics) design philosophy, which emphasizes simple, efficient, and often analog circuits to create lifelike behaviors. This light-seeking robot is powered by solar energy, making it an environmentally friendly project that harnesses renewable energy for operation.
The robot's core functionality revolves around its ability to detect light sources and navigate towards them. This is typically achieved using light-dependent resistors (LDRs) or phototransistors that serve as sensors. When the robot is exposed to light, the sensors detect the intensity of the light and send corresponding signals to a simple logic circuit or a series of analog components that adjust the movement of the robot's motors.
The schematic of the robot would typically illustrate the connections between the solar panel, the sensors, the motor drivers, and the control circuitry. The solar panel converts sunlight into electrical energy, which is used to power the entire system. The sensors are positioned in such a way that they can detect light from different angles, allowing the robot to determine the direction of the light source.
The movement mechanism usually consists of two or more DC motors that drive the wheels or legs of the robot. The control circuit interprets the sensor signals and adjusts the motor speeds accordingly to steer the robot towards the light. For instance, if one sensor detects more light than the other, the control circuit will slow down the motor on the side with less light, causing the robot to turn towards the light source.
In summary, this light-seeking solar-powered robot exemplifies the principles of BEAM design by integrating simple sensors and motors with solar energy, resulting in an autonomous and efficient device capable of responding to its environment. The inclusion of visual aids such as pictures and videos in the article provides a comprehensive understanding of the robot's design and functionality, while the schematic offers a clear representation of the electronic components involved in its operation.A light-seeking solar-powered tiny robot based on a BEAM design. Article includes pictures, links, a video, and a schematic.. 🔗 External reference
Related Circuits
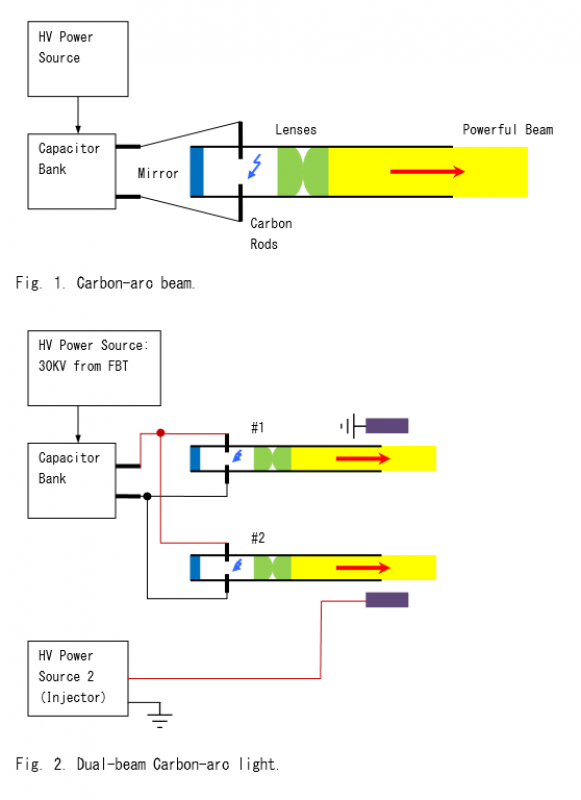
The carbon arc beam was extensively utilized as a searchlight during World War II. A basic configuration is illustrated in Figure 1. The basic beam generator can be modified as shown in Figure 2 to enable high-voltage (HV) electricity...
The circuit employs a widely used Sharp IR module (the Vishay module may also be utilized). The pin numbers indicated in the circuit pertain to both the Sharp and Vishay modules. For other modules, it is recommended to consult...

A line follower robot is designed to follow a designated path on a track. Typically, this type of robot is managed by a microcontroller. The line follower robot operates using a series of sensors, commonly infrared (IR) sensors, to detect...
Current sensing involves detecting the amount of current being used by a specific circuit or device. It is particularly useful for assessing the power consumption of various components within a robotic system. Although not commonly required in robotics, current...
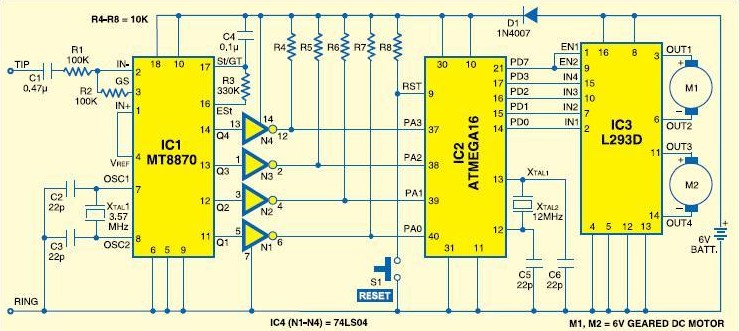
Mobile robot schematic diagram for a cellphone-controlled robot. Detailed modules used for the cellphone-controlled mobile robot include: DTMF Decoder: MT8870/CM8870; Microcontroller: ATMEGA16; Motor Driver: L293D; Actuator: DC Motor 5-6V. The mobile robot schematic diagram is designed for operation via a...
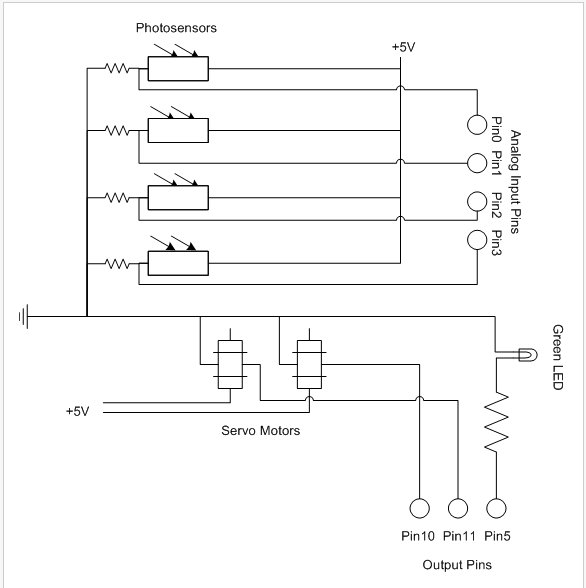
The PhytoBot is a semi-intelligent plant that reacts to external stimuli, specifically light intensity and light location, mimicking the behavior of a phototropic plant. It is designed as an interactive artwork intended for prolonged operation. The motivation behind this...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713