
High-Speed Photos of Low-Speed Impacts
To ensure consistent drop points for the ball, a manual release is not feasible. Instead, a dropping mechanism utilizing an induction coil was developed, as steel balls are magnetic. The coil is wrapped in white paper for visibility. When the current through the coil is turned off, the ball is released. To mitigate sparks and high voltage spikes, an RC-damped MOSFET-based switch is employed to control the current through the coil gradually. However, the timing of the switch is not precise enough to serve as a start signal, thus a custom light barrier is implemented. This light barrier comprises an orange LED and a photodiode, with a lens positioned in front of the LED to focus the light. The interruption of light by the falling ball serves as the start signal. Following this event, the ball descends and eventually makes contact with sand, with the fall time typically in the range of several hundred milliseconds for drop heights below one meter.
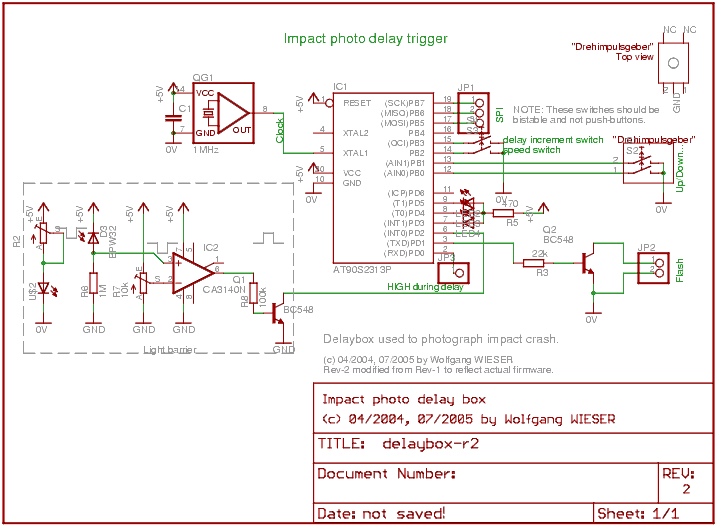
A delay trigger has been designed to initiate upon receiving the start signal from the light barrier, wait for a specified duration, and then trigger the flash. The delay can be adjusted in increments of 500 microseconds using an impulse switch. The microcontroller's intrinsic accuracy, due to interrupt handling, is 4 microseconds, with the base clock maintaining a tolerance of less than 100 parts per million. Three LEDs connected to the microcontroller provide visual feedback indicating changes in delay when the switch is adjusted. Additionally, a JP3 connector is linked to a custom frequency counter to measure the actual delay time. An auto-increment mode is also available, allowing the microcontroller to automatically increase the delay by a fixed amount after each trigger event. The microcontroller operates with a self-developed firmware, written in C and compiled using avr-gcc, and is programmed via a USB-based Atmel programmer.
The schematic for this setup includes the following components:
1. **Digital Camera**: The primary imaging device, which requires control signals for shutter operation.
2. **Induction Coil**: Used to hold and release the steel ball, controlled by a MOSFET switch.
3. **MOSFET Switch**: An RC-damped switch to manage the current through the induction coil, preventing high voltage spikes.
4. **Light Barrier**: Comprising an orange LED and photodiode, used to detect the ball's drop and trigger the timing mechanism.
5. **Microcontroller**: Responsible for processing the start signal, managing the delay, and firing the flash. It includes a clock for timing precision and outputs for the LEDs and frequency counter.
6. **Impulse Switch**: A user interface component that allows for manual adjustment of the delay time.
7. **LED Indicators**: Provide visual feedback on the current delay setting.
8. **JP3 Connector**: For connecting to an external frequency counter to monitor timing accuracy.
The complete circuit is designed to ensure precise timing and synchronization between the camera shutter, the ball release, and the flash, enabling high-resolution capture of fast events.The goal is to freeze different stages of some fairly quick process (at least when compared to the time resulotion of the human eye). Since I don`t have fancy toys like a high speed film camera, lack of good equipment has to be compensated with a smart setup applying just a an ordinary consumer-type digital camera and some self-made electronics.
U nfortunately, the camera`s minimum exposure of about 1ms is too long for the purpose and furthermore the delay from pressing the button to actually opening the shutter is around a second - quite long. So, the basic idea is to make the complete room dark, open the shutter of the camera, drop the ball, ignite the photo flash after some time and close the shutter again.
This way the real exposure time is given by the duration of the photo flash which was measured by me (using a DSO) to be less than 100us (better than 1/10, 000 second) when set up accrodingly. So, first we need to hold the ball and make sure it falls down each time at the same point, so using one`s own hands is not an option.
Instead, since steel balls are magnetic, we built a dropping device made of an induction coil. (In the image on the right, white paper is wrapped around the coil. ) When switching off the current through the coil, the ball drops down. To prevent sparks and high voltage peaks, we were actually using a RC-damped MOSFET-based switch to slowly turn on/off the the current through the coil. Hence, using the switch time as start signal is not precise enough and a self-made light barrier was used.
The light barrier consists of a orange LED and a photo diode. In front of the LED, a lens was introduced to focus the light onto the LED. Light interruption by the ball is the start signal. After the start signal, some time passes during which the ball drops down and then finally touches the sand. This time is in the order of several 100ms for usual drop heights below 1m. I designed a delay trigger which will start running when the light barrier sends the start signal, wait some time and then fire the flash.
The time can be varied in steps of half a millisecond (500us) using an impulse switch ("Drehimpulsgeber"). The intrinisc accuracy of the microcontroller (due to interrupt handling) is 4us and the base clock has a tolerance of less than 100ppm.
The 3 LEDs connected to the microcontroller are a delay change indication for visual feedback when turning the switch. Additionally, the JP3 connector was connected to my self-made frequency counter to measure the actual delay time.
There is some additional comfort like a switch which will enable auto increment mode where the microcontroller will increase the delay automatically by a fixed amount after each trigger event. The microcontroller runs a self-developed firmware (written in C, compiled with avr-gcc) and was downloaded onto the controller using my USB-based Atmel programmer.
🔗 External reference
Related Circuits
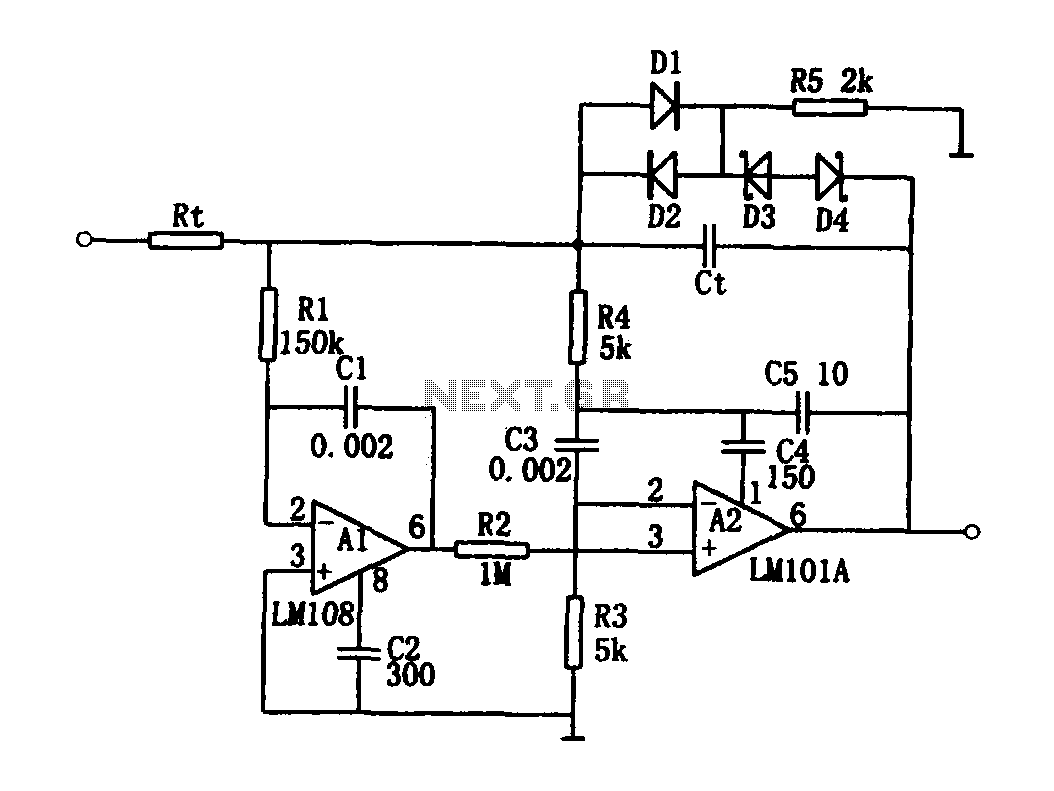
The high-speed integrating circuit is designed with an integration time constant circuit, RtCt, which offers a wide range. When the integrating capacitor Ct is not considered, A2 functions as a positive feedback compensation broadband AC amplifier. The negative feedback...
This application note provides insight into how to synchronize multiple high-speed DACs in transmitter applications. This document outlines the techniques and methodologies for synchronizing multiple high-speed Digital-to-Analog Converters (DACs) in various transmitter applications. Synchronization is crucial in systems where multiple...
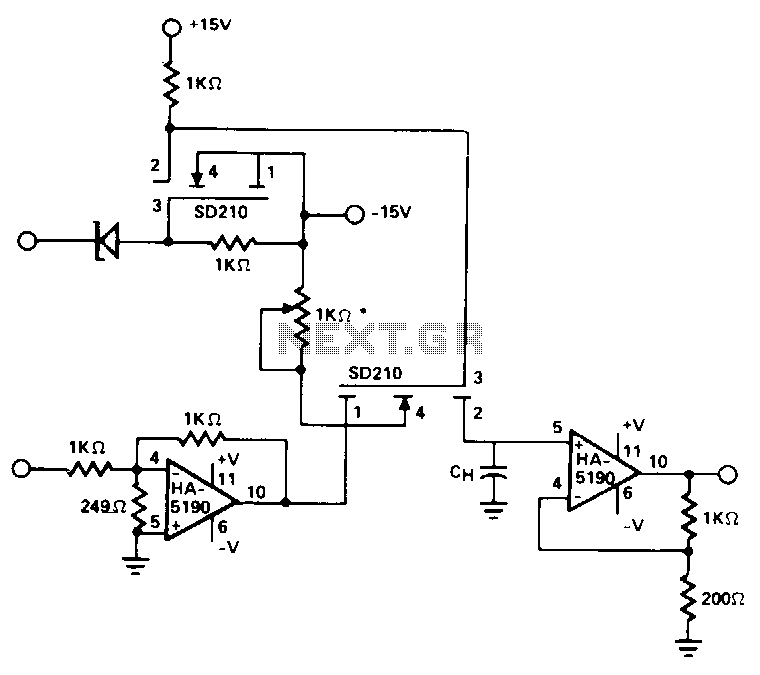
This circuit utilizes the speed and drive capability of the HA-5190 in conjunction with two high-speed DMOS FET switches. The input amplifier is configured to operate at a gain of -5, while the overall circuit gain remains at unity....
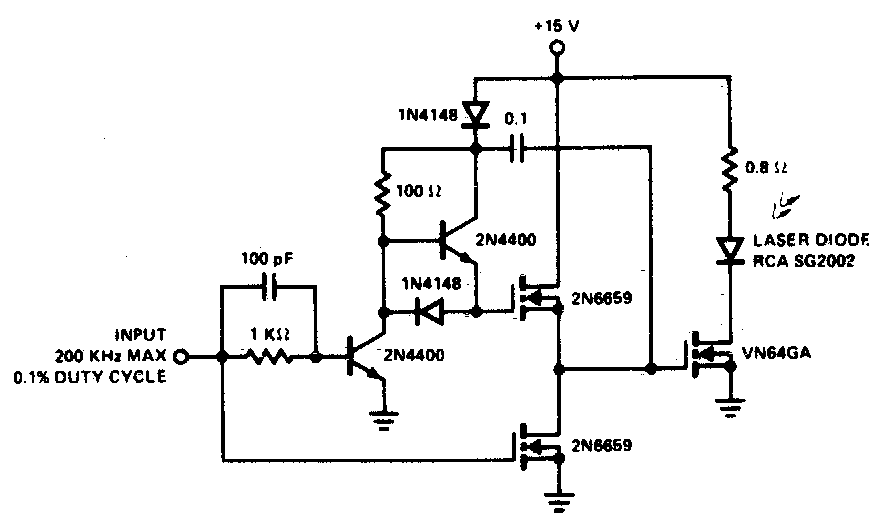
A faster driver can supply a higher peak gate current to switch the VN64GA very quickly. The circuit uses a VMOS totem pole stage to drive the high power switch. The described circuit employs a VMOS (Vertical Metal Oxide Semiconductor)...
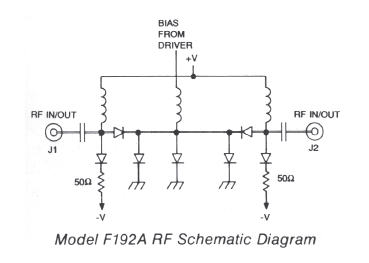
High-speed frequency range of 0.2 to 18 GHz with 80 dB isolation. Features non-reflective performance, low Voltage Standing Wave Ratio (VSWR), and minimal insertion loss. Compact and lightweight design. This electronic component is designed to operate efficiently across a broad...
The following article is a continuation of the application note titled "Defining and Testing Dynamic Parameters in High-Speed ADCs, Part 1." It outlines the test conditions and setup recommendations necessary for effectively measuring the dynamic performance parameters of high-speed...