
Light Tracking Servo System
The light tracking servo system operates through a feedback loop that continuously adjusts the position of the PV array based on the intensity of light detected by the photo-sensitive resistors. The error voltage generated by the difference in light intensity is amplified and used to control the DC motor, ensuring that the PV array maintains optimal alignment with the light source throughout the day.
The mechanical design of the system is critical, as it must allow for smooth and precise movements of the PV array. The triangular plexiglass mount provides a stable platform for the photo-sensitive resistors, and the motor is securely fixed to allow for effective rotation of the array.
The electrical components are carefully chosen to ensure reliability and efficiency. The operational amplifier used in the amplifier circuit must have a suitable gain to ensure that even small differences in light intensity result in adequate motor response. Additionally, the capacitors used in the filtering stage must have appropriate voltage ratings and capacitance values to minimize ripple voltage and ensure stable DC output.
In summary, the integration of the mathematical model, the physical components, and the computer simulation in Matlab provides a comprehensive understanding of the dynamics of the light tracking servo system, facilitating the design and optimization of photovoltaic array systems for improved energy efficiency.Sun tracking systems are very effective in increasing the efficiency of photovoltaic (PV) arrays, and are essential for concentration PV systems. The following paper discusses a light tracking servo model which has been built to simulate the movement of a PV array.
A mathematical model is developed and a qualitative comparison of the mathematical model and the actual physical model is done to demonstrate the dynamics of a light tracking servo system. An overall transfer function for a permanent magnet direct current (dc) motor was also developed. This subject is treated as a separate Case Study in this course (see Case Study F). The motor transfer function is used in the development of an overall transfer function for the light tracking servo system. Using the overall transfer function, a computer simulation program within Matlab is used to simulate the dynamics of the servo system.
A qualitative analysis of the Matlab results and the dynamics of the working physical model are compared to clearly illustrate the important dynamics of the system. The light tracking system consists of a permanent magnet dc motor, a directional light detecting circuit, and an amplifier to drive the motor.
Refer to the model and to Fig. 6E. 1 for the physical configuration and a simple block diagram representation. Two photo sensitive resistors are physically mounted on a triangular plexiglass mount so that when the panel (the aluminum bar) is perpendicular to the light source, each receives an equal amount of irradiance. When one receives more light than the other, the panel is not aligned properly and an error voltage results.
The error voltage is used as a command to an amplifier circuit to drive the motor and align the panel to be perpendicular to the light source beam. The following subsections describe in detail the mechanical and electrical components of the model. To make the light tracking model self sufficient, a plus and minus 12 volt dc power supply is necessary for the electronic components.
In a typical solar application, this dc power source is obtained directly from the PV panels or batteries charged by the PV panels. However, in this case, the dc power is obtained by converting the standard 110 ac (alternating current) power from the wall socket.
For this application, the power supply is designed to handle a two ampere load. Figure 6E. 2 shows the electrical circuit which handles the conversion of ac to dc power. The circuit can be divided into four sections; transformation, rectification, filtering, and regulation. 1. Transformation is accomplished by the transformer (T1) which steps down the 110 volts to two 15 volt peak ac sources.
In a properly designed circuit, the secondary voltage should be 20 volts peak. The lower voltage level causes some ripple voltage on the output under load conditions of 1. 5 amp or greater. The two secondaries are tied together at one end to form the common ground of the dc source. This common ground is not the same as the ground from the wall. 2. Rectification is accomplished by the diode bridge configuration B1. Although the circuit seems to indicate a bridge rectifier, it is actually two full-wave rectifiers. The right side of the bridge provides positive full-wave rectification while the left side provides negative full-wave rectification. 3. Filtering is provided by capacitors C1 and C4 which level the rectified signal to 🔗 External reference
Related Circuits
This circuit can be utilized to verify the functionality of servos, assess full travel, detect binding, and identify any drag or rubbing when the servos are integrated into a model. It may also serve as a control circuit in...

This motor driver circuit utilizes a p.A759 power amplifier to drive a two-phase servomotor. The motor driver circuit is designed to efficiently control a two-phase servomotor, leveraging the capabilities of the p.A759 power amplifier. This amplifier is specifically chosen for...
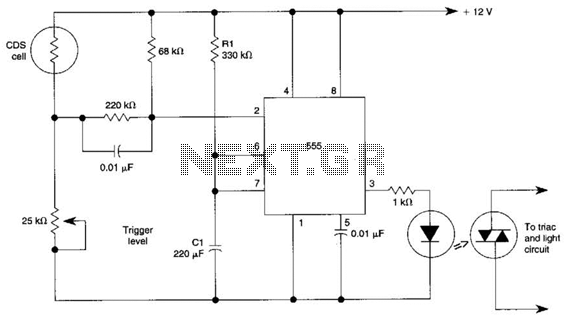
This circuit can control the on/off cycle of a light using a CDS photocell and turn it off after a preset period. The light can only be activated when the CDS cell is in darkness, and it remains on...
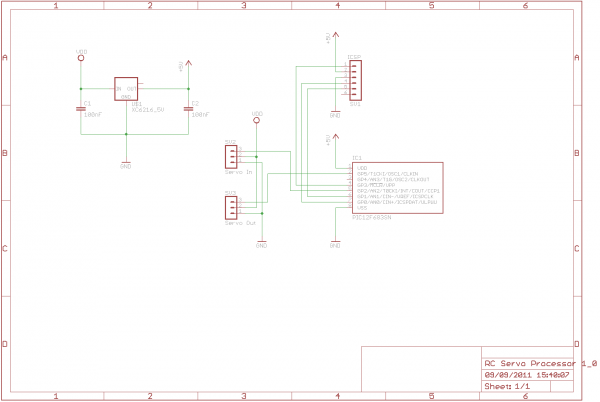
In the ongoing development of an autonomous sailing robot, a method was required to expedite the prototyping of boat designs. The objective was to utilize a standard remote control (RC) model control system to leverage off-the-shelf components, thereby saving...
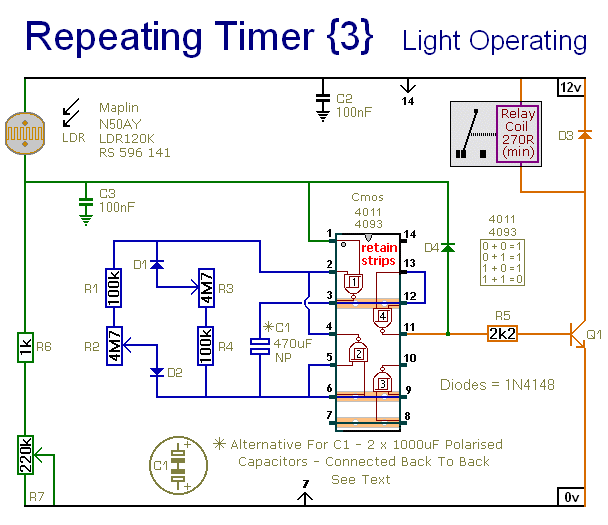
This circuit closely resembles Repeating Timer No. 2. However, the inclusion of a light-dependent resistor (LDR) allows the timer's operation to be confined to daylight hours. Resistor R7 enables the adjustment of the light level at which the timer...
The schematic for this project has been revised, and a new printed circuit board (PCB) has been produced. Project files for the lighthouse project are available. The project is developed for the PIC12F683 microcontroller using SourceBoost Technologies' BoostC tool...