
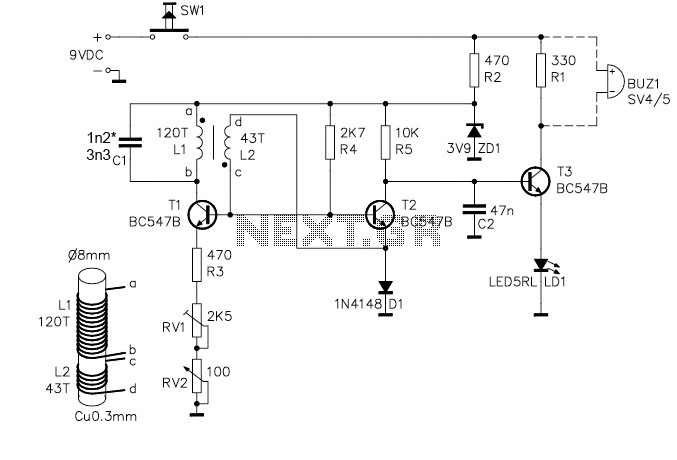
Metal detector circuit
The project centers around a robotic system integrated with various sensors and a microcontroller, facilitating autonomous navigation and interaction with a user interface. The microcontroller serves as the central processing unit, interfacing with metal detectors and infrared sensors to gather environmental data. The successful connection of these components indicates readiness for further software development. The C++ code, which will govern the robot's behavior, is crucial for interpreting sensor data and executing navigation algorithms.
Operational modes such as wall following, grassfire, and potential field allow for versatile navigation strategies. The wall-following mode enables the robot to maintain proximity to walls, while the grassfire and potential field modes facilitate exploration and pathfinding based on environmental feedback. The implementation of joystick control allows for manual intervention, enhancing user control over the robot's actions.
The central command server plays a pivotal role in coordinating the robot's operations, processing goal coordinates, and recalibrating the navigation map in real-time. The introduction of a webcam enhances situational awareness, enabling remote operation and oversight during autonomous tasks. This comprehensive setup reflects a sophisticated integration of hardware and software components, paving the way for advanced robotic applications.Our project demo is also successfully finished and the only thing left to do for this project is the final project report which is due June 15 since we are integrating that report with a conference paper. This is the last update I`ll be making to our electronic notebook, but I`ll add the final report to our project website when that is completed.
This week Dr. Malinowski and I connected all the hardware to the microcontroller and tested all of the components. The metal detectors, the analog and the digital IR sensors all worked correctly. We tested this by connecting the microcontroller to hyperterminal on the computer and got favorable results. This means that the hardware is all complete and ready for interfacing in the C+ code. The C+ code can now be written to account for the metal detectors, and the IR sensors. Here is a copy of the code that is running on the microcontroller: Microcontroller Code Our Final Senior Presentation is April, 29th 2010.
Scott Tipton and I have updated and practiced the presentation and are ready to present. Scott also updated the website today, to show all of our completed work as well as our updated presentation. This week I finished the server/central command setup for our project. The server can now switch between the following modes: wall following, grassfire, potential field, random movement, joystick/user override, and quit.
I also setup the robot agent to accept goal coordinates from the server instead of a local user. At anytime if I change the goal coordinates while in grassfire or potential field, the map is recalculated. Also, if I switch between the two path finding modes it will use the same goal coordinates setup by the server.
Joystick is also fully implemented on the server side now so that central command now overrides the robot instead of a local user. Dr. Malinowski programmed the joystick code to run in its own thread and all I have to do to activate it is to switch to the joystick mode (m robot name` joystick mode #`) and turn the joystick on (j robot name`).
I modified my wall following code to be more lenient on possible bad readings since when run on the actual robot sonar sensors, more bad readings occur than in the simulation. I did this by creating a counter that would count up to five if readings were 1200mm or greater. This should allow the robot to only make right turns during opening since normally 5 bad readings wouldn`t occur in a row.
I also attached a webcam on the robot so that when central command is overriding robot control, it can see where to direct the robot. I used a program called dorgem to create a local web serv 🔗 External reference
Related Circuits
Battery Indicator Circuit for the Caravan. This i-TRIXX circuit can prevent a lot of trouble for those who go on holiday in a caravan. It would be a significant damper on your holiday spirit when you are unprepared. The Battery...
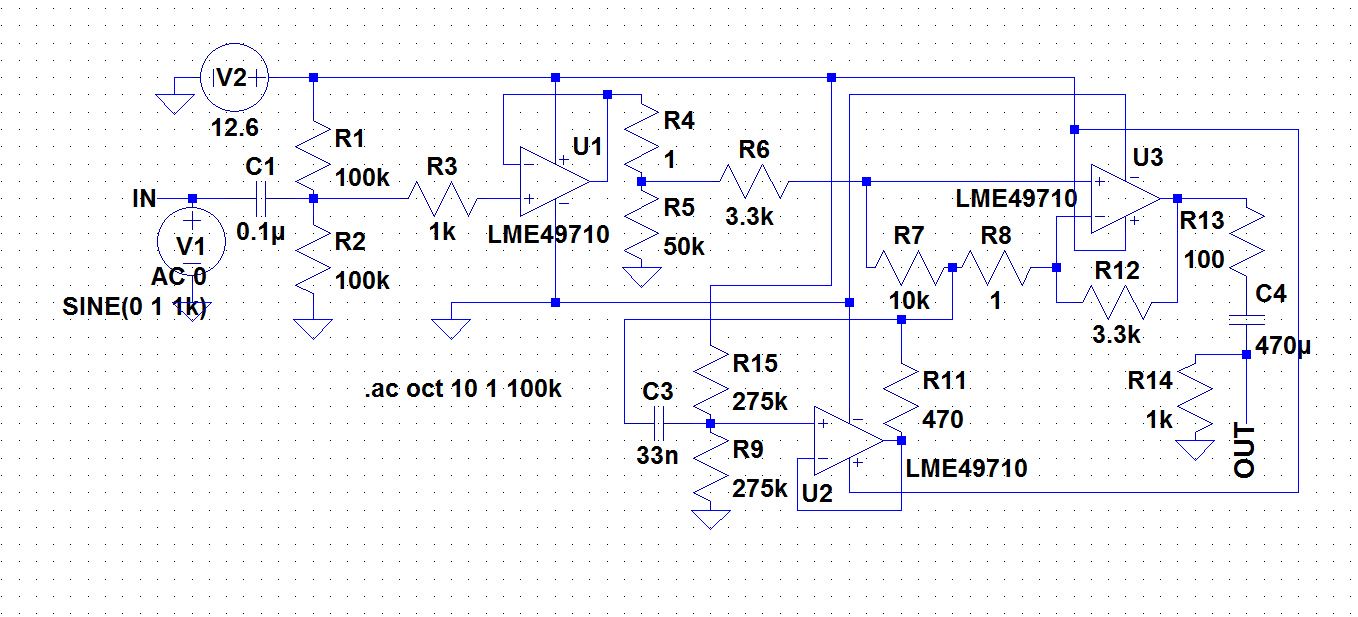
A circuit was required to function as a bass boost. The design was adapted from a circuit by ESP Sound, focusing solely on the frequency range of 35-150 Hz. The bass boost circuit, as adapted from the original design, primarily...
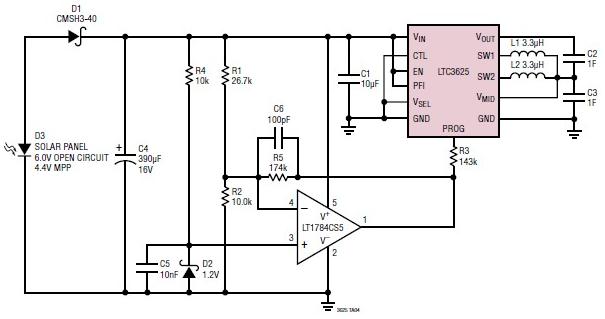
A simple supercapacitor charger electronic project can be designed using the LTC3625 integrated circuit (IC) from Linear Technology. This circuit is capable of charging two supercapacitors in series to a fixed output voltage of either 4.8V/5.3V or 4V/4.5V, which...
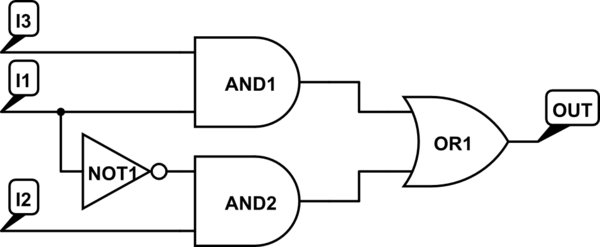
There are integrated circuits that contain AND, OR, and NOT gates. The inquiry revolves around the existence of a single chip that encompasses all the required logic gates. If such a chip does not exist, specific alternatives should be...
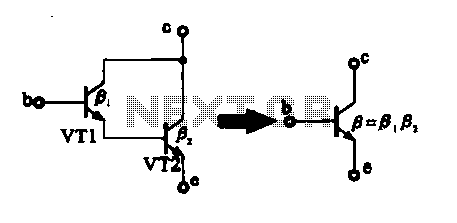
There are two composite pipe configurations: one consists of two transistors of the same type, while the other is made up of two different types of pipe configurations. The first configuration, utilizing two transistors of the same type, typically involves...
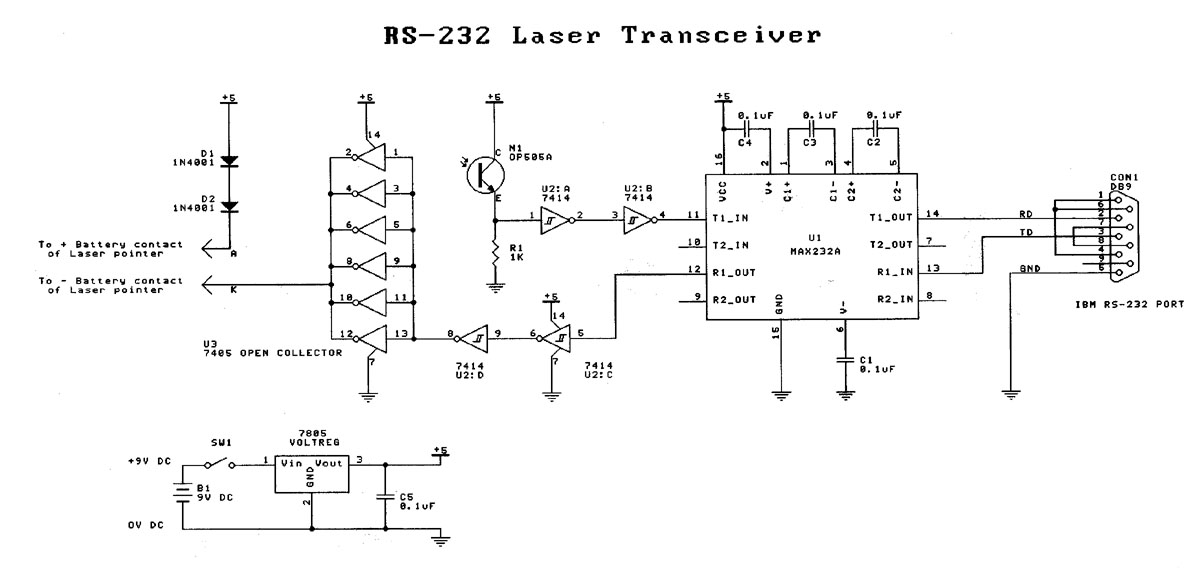
Laser based projects used to be expensive, until the development of solid state lasers. This project is designed for the entry level laser experimenter. The circuit allows any two computers with serial (RS-232) communication capability to communicate over 200...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713