
Slow Servo

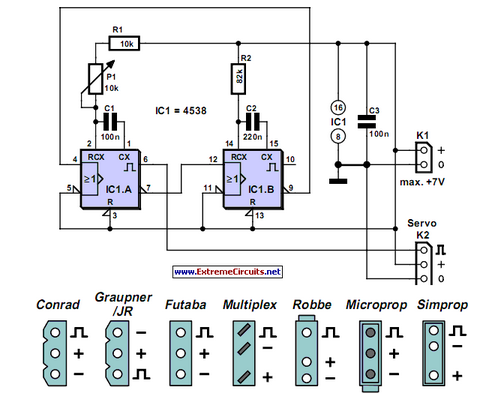
This circuit slows the speed of a conventional proportional servo. It regulates the time required for full servo rotation from 1 to 10 seconds without any reduction in the servo's torque, and every servo position is possible (proportional). More: It is suitable for:
* Landing gear
* Flaps
* Throttle control of gas-turbine engines
* LMH-110 (with modified hex file, see below) is very simple because it uses a microcontroller. Set-up is also very simple. First program the con
The described circuit is designed to provide smooth and realistic actuation for applications such as landing gear deployment, flap adjustments, and throttle control in gas-turbine engines. The core functionality is achieved through a microcontroller that manages the speed of a conventional proportional servo.
The circuit operates by regulating the pulse width modulation (PWM) signal sent to the servo, which directly influences its rotation speed. By adjusting the duty cycle of the PWM signal, the microcontroller can control the time it takes for the servo to move from one position to another. The design allows for a full range of motion, ensuring that the servo can achieve any position within its operational limits while maintaining its torque characteristics.
The timing for the servo's movement can be configured to range from 1 to 10 seconds, providing flexibility for different applications. This feature is particularly useful in modeling scenarios where realistic motion is required, such as in radio-controlled aircraft or other remote-controlled devices.
The setup process for this circuit is straightforward. Initially, the microcontroller must be programmed with the appropriate firmware, which includes the logic for controlling the servo speed and any specific parameters related to the application (e.g., timing settings for landing gear or flaps). The mention of modifying the hex file for the LMH-110 indicates that specific adjustments may be necessary to tailor the operation of the circuit for different hardware configurations.
In summary, the circuit is an effective solution for achieving realistic actuation in various applications, leveraging the capabilities of a microcontroller to provide precise control over servo movements while ensuring that torque is not compromised. This design is suitable for hobbyists and professionals alike, offering a simple yet powerful means of enhancing the functionality of proportional servos.Realistic flap and landing gear actuation. This circuit slows the speed of a conventional proportional servo. It regulates the time required for full servo rotation from 1 to 10 seconds without any reduction in the servo`s torque, and every servo position is possible (proportional). It is suitable for: * Landing gear * Flaps * Throttle control of gas-turbine engines * LMH-110 (with modified hex file, see below) is very simple because it uses a microcontroller. Set-up is also very simple. First program the con 🔗 External reference
Related Circuits
The Olimex P-40 development board will be utilized, though the circuit can also be constructed on a breadboard due to its simplicity. The schematic for the initial implementation of servo control is provided below. Servos, like any motors, can...
The large servos shown alongside a Nokia 3310 mobile phone provide a reference for scale. The servo arms measure 12 cm in length, making them suitable for lifting a bank of solar panels. The local Model Aerodrome in Seaside...
A modified version of the previous program allows control of multiple servomotors, utilizing all available I/O lines on port B. The following listing demonstrates the control of two servos similarly to how a single servo was managed in the...
The all-analog circuit presented controls the rate at which a miniature turbojet engine can be throttled. Increasing or decreasing the throttle too quickly on a miniature turbojet engine, or any jet engine, can lead to quick failure in flight,...
Individuals who frequently work with servos are likely familiar with situations where a servo tester is beneficial. The primary function of a servo tester is to produce a pulsing signal with a variable positive pulse width ranging from 1...
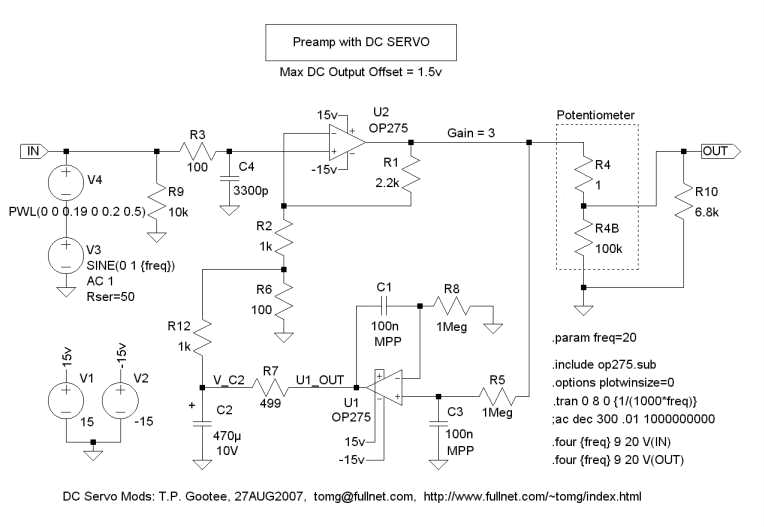
Additional experimentation has been conducted with the LTspice simulation of the Dxvideo preamplifier circuit that includes a DC servo. The .four command has been utilized within the simulation environment. The LTspice simulation of the Dxvideo preamplifier circuit featuring a DC...