
Subsumption Architecture
The subsumption architecture is a pivotal concept in the realm of robotics, particularly in the context of behavior-based robotics. This architecture allows for the development of robots that can exhibit complex behaviors through a structured layering of simple, reactive modules. Each module is responsible for a specific behavior, and the interactions between these layers enable the robot to respond dynamically to its environment.
In practical applications, the design of a subsumption architecture begins with identifying the fundamental behaviors required for the robot's operation. These behaviors are then encapsulated within individual modules that are organized hierarchically. For example, a robot designed to navigate a space might include layers for obstacle avoidance, light following, and exploration. The lowest layer, which may be responsible for avoiding obstacles, operates reflexively and continuously, while higher layers, such as exploration, can make decisions based on the outputs of the lower layers.
This architecture is particularly advantageous because it allows for a decentralized control structure. Each layer can operate independently, responding to sensor data and generating actuator commands without the need for centralized coordination. This not only enhances the robot's responsiveness but also contributes to its robustness; if one layer fails, the others can continue to function, albeit with reduced capability.
The integration of BEAM circuits with subsumption architecture presents an exciting avenue for enhancing robotic autonomy. BEAM robotics emphasizes minimalism and efficiency, which aligns well with the principles of subsumption. By combining these two approaches, robots can achieve greater adaptability and resilience, enabling them to navigate complex environments with minimal oversight.
In summary, the subsumption architecture offers a powerful framework for designing intelligent robotic systems. By breaking down complex behaviors into manageable modules, this architecture facilitates the development of robots that can adapt to their surroundings in real-time, paving the way for more sophisticated and capable autonomous systems in the future.A term used when referring to a robotic control concept, developed by Rodney Brooks, which is strongly associated with Behavior-based robotics, a branch of robotics research that incorporates modular Behavior Based AI Whereas traditional Artificial Intelligence tends to rely on a centralized, top down, planning, execution and monitoring structur e, subsumption architecture is a distributed, bottom up, reflexive approach to robot control. Subsumption Architecture breaks complicated intelligent behaviors into many "simple" behavior modules. These modules are in turn organized into layers, each layer implementing a particular goal of the robot.
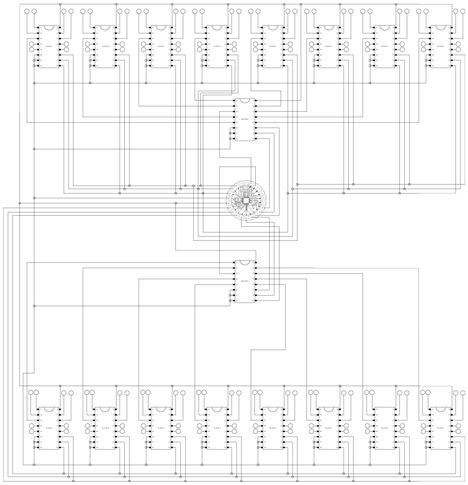
Higher layers become increasingly more abstract with each layer subsuming the goals of the layers below it. This means for instance that a decision to move made by the Explore layer (see Figure 1 ) must take into account the decision of the ` Follow Light layer directly below it, as well as the lowest layer labeled Avoid Obstacle.
Each layer can access all of the sensor data and generates commands for the actuators. And each separate tasks can suppress (or overrule) inputs or inhibit outputs. This way, the lowest layers can work like fast-adapting mechanisms ( reflexes ), while the higher layers work to achieve the overall goal. The idea of of merging BEAM circuits with subsumption architecture goes way back to the earliest days of BEAM Robotics.
As proof, note that the following quote from Mark W. Tilden, which dates back to Oct of 1996. {Mark Tilden|Mark] made these comments in a post he sent to the original BEAM email list, in response to another post about using a Tilden -esque nervous net as the lowest layer in a Brooks -style subsumption architecture . When I first started reading Brooks, I immediately built a variety of my own Subsumption based machines ( micromouse, two- legged walker, three legged hopper, remote submarine, etc), and immediately found the same problem I`d had with conventional parallel -design robotics.
To whit. Subsumption is better than parallel - control designs (which are VERY brittle, especially as they are so software/connection dependent), but the same complexity problem kept popping up in my subsumption designs as well. The layered structure is a beautiful, threaded way to think about behavioral control, but when one exception is made, you have to make other exceptions to counter it, and after a while, you have a mess you`ve forgotten how to debug five minutes after the download.
The Nv approach is not just a robust way to phase - drive motors, it`s my attempt at a design methodology that gives linear ability for linear complexity. If you`ve built the bare-bones Nv walker you know it works. The secrets are minimality and symmetry (I get pissed if I have to use two whole hex inverters for a complete walking design, and doubly so if the circuit has ugly bumps in the schematic ).
But there`s more. Nv tech is not just a bunch of oscillators, work we`re doing now shows that given the right type of Nv designs, capable autonomy is not just possible, it is, given the right neural morphology, damn well inevitable over a vast spectrum. That is, there now exist Nv designs that give Exponential ability increase for linear complexity increase, and they still work even if the damn thing gets chain-sawed!
I think the secret of life is anything that exhibits more competent survival behaviors than components ( biological plausable Anyone ). The problem is, if you stick a processor on top of it, you run the risk of violating this rule, and even worse, imposing artificial values from the uP on a Nv more capable of handling itself.
Getting a Nv to work is simple. Hooking it up so it can work with other influences, aye therrre`s the rub, and a major unexplored research field. We`ve had one successful uP interface (Telluride, July 96), but not a few other laughable failures (i.
e. : the apply named Spazbot). So it c 🔗 External reference
Related Circuits
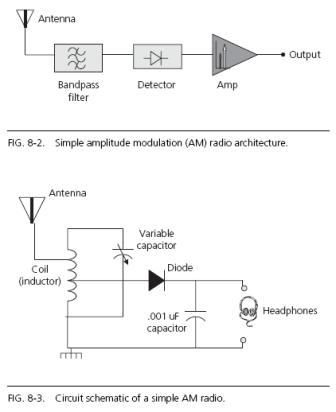
The fundamental operation of an RF front end is straightforward: it detects and processes radio waves transmitted at a specific known frequency or range of frequencies and modulation format. The modulation carries information of interest, such as voice, audio,...
Various architectures of receivers have been proposed in literature, but the most popular architectures among them, such as Heterodyne, Homodyne, Wideband-IF, and Low-IF, are presented here. The Heterodyne receiver architecture utilizes two frequencies: the incoming radio frequency (RF) signal and...
The primary inquiry to address is the contemporary understanding of video processing. Until the late 1980s, two distinct realms existed: the analog television domain and the digital computing domain. All television processing, from the camera to the receiver, relied...
The moss tiles are part of a series of RAD experiments aimed at utilizing ceilings for healthier and more vibrant interiors. RAD identifies the ceiling as an underutilized area for creating interior landscapes. This space can be reclaimed by...