
The Follow-Me Rover robot circuit
The Follow Me Rover integrates several key electronic components to achieve its functionality. At the core, the Devantech TPA81 Thermal Sensor Array provides critical data on heat sources, allowing the robot to effectively track its human operator. The eight detectors in the array are strategically positioned to maximize coverage and sensitivity to infrared radiation, enhancing the robot's ability to detect and follow a person based on body heat.
The Scorpion motor controller is vital for managing the robot's movement. It interfaces with the four DC motors, which are arranged in pairs to facilitate differential steering. This setup allows for agile and responsive maneuvers, essential for following a moving target. The motor controller's processing capabilities ensure that turns are smooth and coordinated, which is crucial for maintaining a stable following behavior.
The Parallax Servo Controller adds another layer of control by simplifying the process of generating servo signals. By accepting serial commands, it offloads the complexity of pulse generation from the main processor, allowing for more efficient use of resources. This modular approach is beneficial, as it enables easy adjustments to the control algorithms without requiring extensive modifications to the hardware.
Power management is another critical aspect of the design. The use of two separate batteries—one dedicated to motors and the other for the electronics—ensures that the robot can operate efficiently for extended periods. The choice of a 7.2-volt battery for the motors provides adequate power for high-torque applications, while the smaller battery supports the lower power requirements of the control and sensor systems.
The Basic Stamp processor serves as the central control unit, processing inputs from multiple sensors and making decisions based on the programmed mission parameters. The PBASIC programming language, while not the most advanced, is user-friendly and allows for rapid prototyping and iterative development of the robot's behavior.
The integration of the proximity sensor, thermal sensor, and ultrasonic sensor creates a robust sensing suite that enables the robot to navigate its environment effectively. The proximity sensor helps avoid obstacles, while the thermal sensor focuses on tracking heat sources. The ultrasonic sensor provides critical distance measurements, allowing the robot to adjust its speed and behavior based on its proximity to the target.
Overall, the Follow Me Rover represents a sophisticated application of various electronic components, showcasing the potential for innovative robotic solutions in real-world scenarios. Its design emphasizes modularity, ease of use, and adaptability, making it a promising platform for further development and exploration in robotics.It uses body heat to locate and track its human master. At heart of this heat seeking capability is the Devantech TPA81 Thermal Sensor Array. The TPA81 consists of an array of eight detectors mounted horizontally. Each of the detectors is capable of detecting infrared at radiant heat wavelengths. The array also provides the current ambient air temperature. By comparing the detectors to the ambient temperature it is relatively easy to detect the presence of a human body and determine its direction. This robot uses a Scorpion motor controller to drive the four DC motors. The motors are wired in two pairs with one pair for the right side and the other on the left. The Scorpion does all the processing required to give smooth coordinated turns. Since I did not want to generate the servo signals directly I used a Parallax Servo Controller (PSC).
The PSC takes simple serial commands and then does all the work of generating the servo pulses. Power for the motors is supplied from a single 7. 2 volt 2800mah battery. This battery is for the motors only. Power for all the other electronics is supplied from a second smaller 1600mah battery. The batteries are capable of running the robot for over an hour. For this application the Basic Stamp is the Mission processor. All the behaviors for this robot`s mission are controlled by this processor. It takes in sensor information and in turn controls the motion of the robot via the motor system. The Stamp is programmed in a language called PBASIC. Although not the most robust language, it is simple to use and modify. This makes it an ideal language to write the high level mission code. There are three major sensor systems which connect to the Basic Stamp. Mounted on the upper deck of the robot are the proximity and thermal sensors. The proximity sensor is used to avoid objects. The thermal sensor is used to locate and track a heat source. Mounted on the lower deck is a Parallax Ping ultrasonic sensor. It is used to measure the distance of objects directly in front of the robot. The proximity and thermal sensors have there own microcontroller and pass simple left/right signals back to the Stamp. Using the Follow Me Rover is quite simple. First stand behind the robot and turn on the motors and then the electronics. The robot will not move until it sees a heat source. Once it does it will start to move and steer in that direction. The robot will select one of three speeds based on the distance measured by the Ping. The further the target is from the robot the faster the speed. As it closes in on its target the robot will slow and eventually stop when within 12 inches. If the distance drops below a 12 inches the robot will back up until the distance is again at 12 inches.
Remote control of the robot is a simple matter of body gestures. Walk a way and the robot will follow. Turn while walking and the robot will turn and continue follow. At any time you can glance back and check the LED bar to determine where the robot thinks you are. If you get into a tight spot just walk toward the robot to make it back up. One interesting behavior is triggered when the robot loses track of its target. Since the TPA81 only has a field of view of about 45 degrees it is possible to out turn the robot. The robot compensates for this by stopping and then spins in the direction where it last saw the target. Once it reacquires the target it will continue to follow. If it fails to find the target it simply stops and waits for you to come back. The technology appears to be robust and scalable enough to create larger and more useful robots. Uses like a follow me cart for disabled persons would seem like a worth while application. Other applications could include inspection, search and rescue, and fire fighting to name a few others.
🔗 External reference
Related Circuits
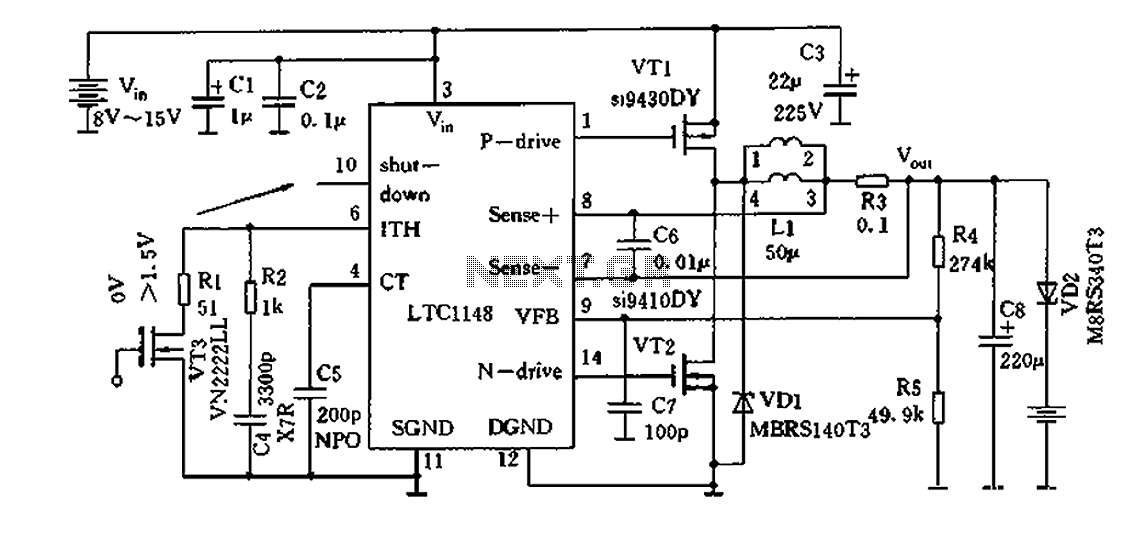
Efficient nickel-cadmium battery charger IC (LTC1148) circuit The LTC1148 is an integrated circuit designed for the efficient charging of nickel-cadmium (NiCd) batteries. This charger IC features a constant current/constant voltage (CC/CV) charging method, which is essential for optimizing the charging...
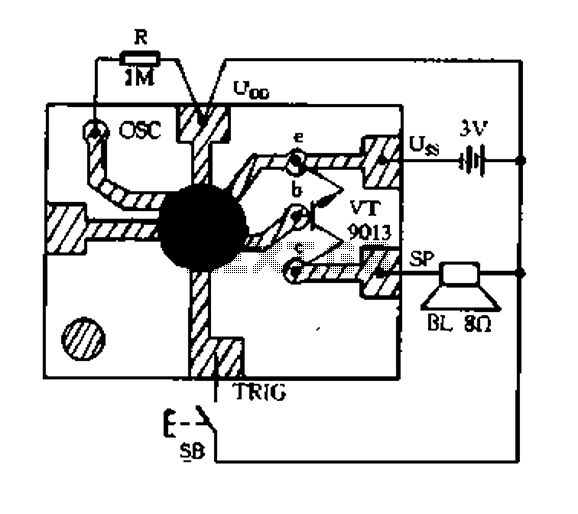
Constantly changing light and sound analog controller circuit 01 The described circuit functions as an analog controller designed to modulate light and sound outputs in a dynamic manner. This circuit typically integrates various electronic components, including resistors, capacitors, transistors, and...
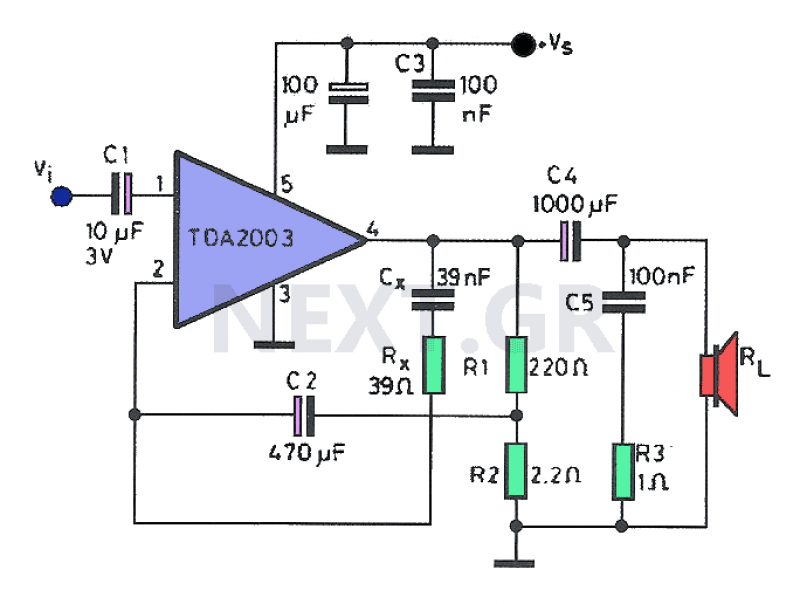
Often, a small amplifier is required to accommodate the needs of compact spaces. This amplifier can be configured as either mono or stereo, and its circuitry is capable of efficiently driving two small speakers. Constructing the amplifier necessitates only...
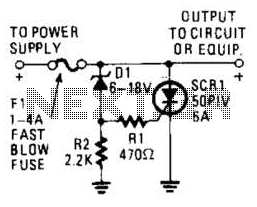
Many modern devices have shutdown circuits that are designed to remove power from the device when the voltage rises above a predetermined threshold. This circuit blows a fuse to protect the device under power. Shutdown circuits are critical components in...
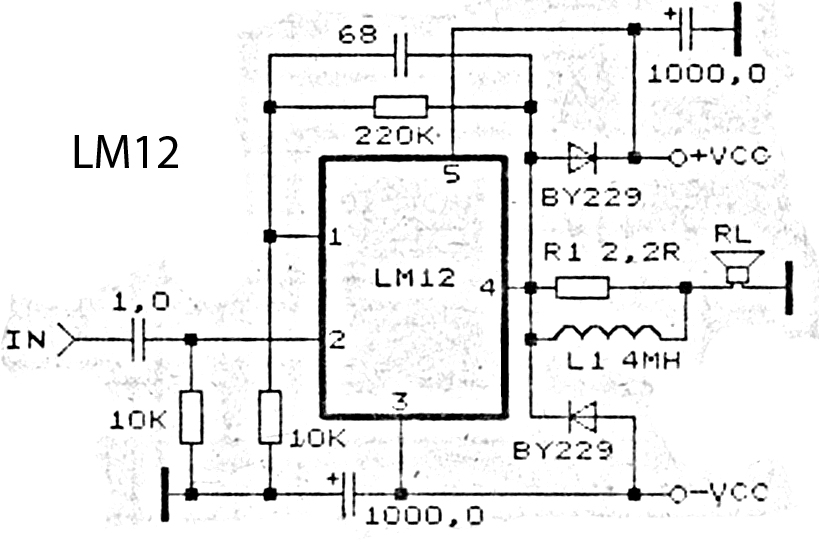
This is an amplifier circuit utilizing the LM12 integrated circuit as the primary amplifier. The amplifier delivers a power output of 150 watts and operates with a load impedance of 4 ohms. It is classified as a high-output power...
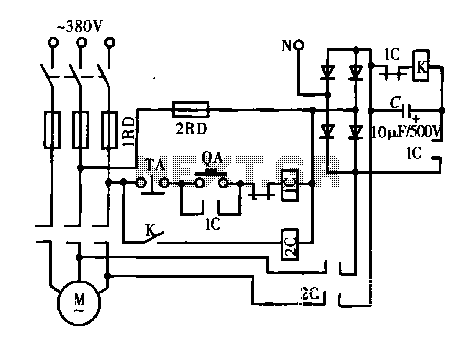
A DC motor is depicted in a dynamic braking circuit. When the stop button (SB2) is pressed, the contactor (KM1) is deactivated, causing its movable contact to disconnect, which interrupts the electrical voltage. Additionally, relay (KV) is activated, closing...