
Travel schematic model remote control
The circuit utilizes the NE556 integrated circuit, which is an evolution of the classic 555 timer, designed for more complex timing and control applications. The dual functionality of the NE556 allows for simultaneous control of two independent timing operations or trigger events. Each section of the NE556 integrates a Schmitt trigger, which is essential for providing clean transitions between high and low states. This characteristic is particularly useful in noisy environments, as it minimizes false triggering.
The TX315B1 module functions as a transmitter in the remote control system, interfacing with the NE556 to manage motor control based on the received signals. The flip-flop configuration is employed to maintain the state of the output, ensuring that the motor's direction can be controlled by the logic levels applied to the Schmitt trigger inputs.
The motor control logic is straightforward: when both inputs to the Schmitt trigger are at the same level (either high or low), the output is designed to disable the motor, effectively stopping it. This safety feature prevents accidental motor activation. When one input is high and the other is low, the output signals the motor to rotate in a designated direction. The ability to reverse the motor's direction by swapping the high and low signals provides versatility in applications where bidirectional motion is required.
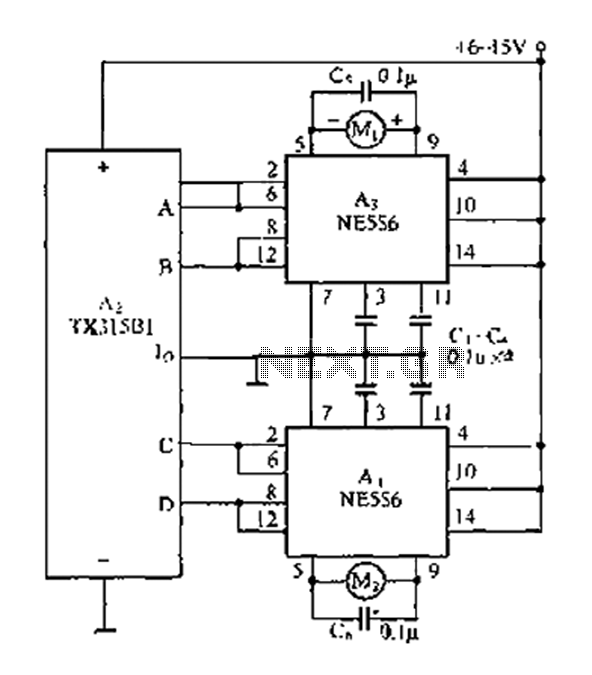
Overall, this circuit design is well-suited for remote control applications, offering reliable motor control with the added benefit of reversing capability, making it ideal for various robotic and automation projects. The integration of the NE556 and TX315B1 components ensures efficient operation and responsiveness to control commands. As shown in FIG travel remote control model is a circuit diagram, NE556 is a dual time base IC 555 includes two separate circuits, each consisting of a Schmitt trigger circuit 555, the output of the control TX315B1 realized by flip-flop flip. When the input of the Schmitt trigger is low, its output terminal output high; when the input is high, its output of low output. When both ends of the motor are high or low, the motor is stopped; when both ends of the motor is high end, and the other side is low, the motor rotation; if the motor across the high, low swap, reverse the direction of rotation of the motor.
Related Circuits
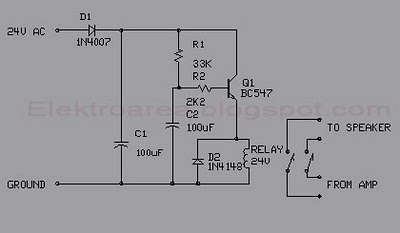
This circuit was designed for an audio amplifier project to control the speaker output relay. The primary function of this circuit is to manage the relay that activates the speaker output in the audio amplifier. The circuit introduces a...
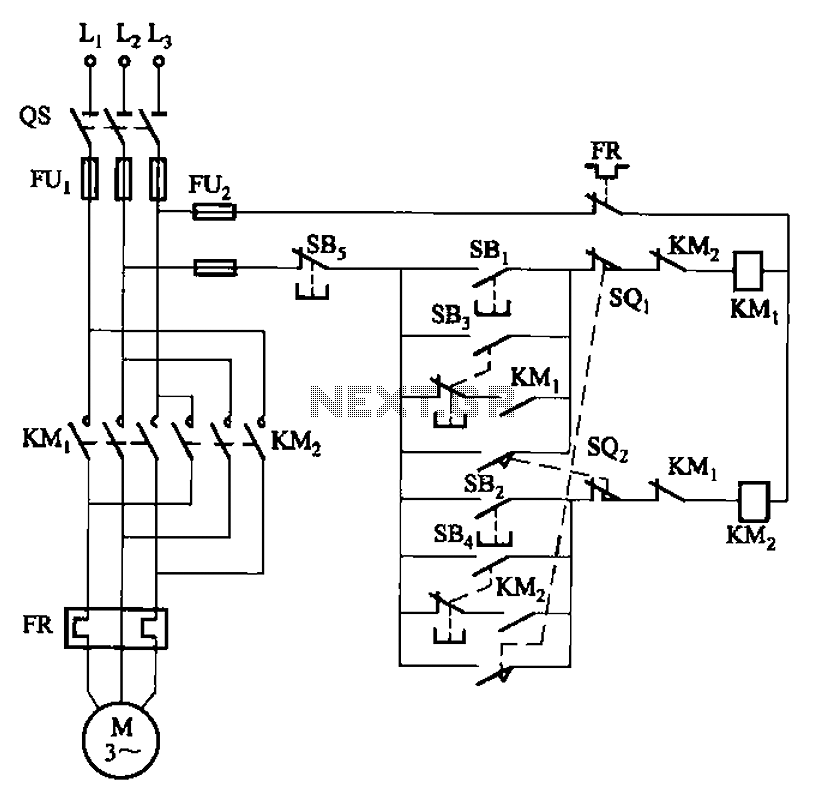
The circuit depicted in Figure 3-27 features a jog function that allows for precise adjustments of moving components. In the figure, SB3 and SB4 represent the forward jog and reverse jog buttons, respectively. When the SB3 button is pressed,...

Sip-and-Puff (SNP) controllers are widely recognized devices, often utilized in electric wheelchairs, enabling individuals with limited hand mobility to control their wheelchairs or other devices through inhaling (sipping) or exhaling (puffing) into a straw. The intensity of the inhalation...
VCR Camera Video Detector Switch Controller Circuit. This video detector switch controller circuit utilizes the video output from a VCR or camera to... This circuit functions as a video detector switch controller, designed to manage the video output from a...
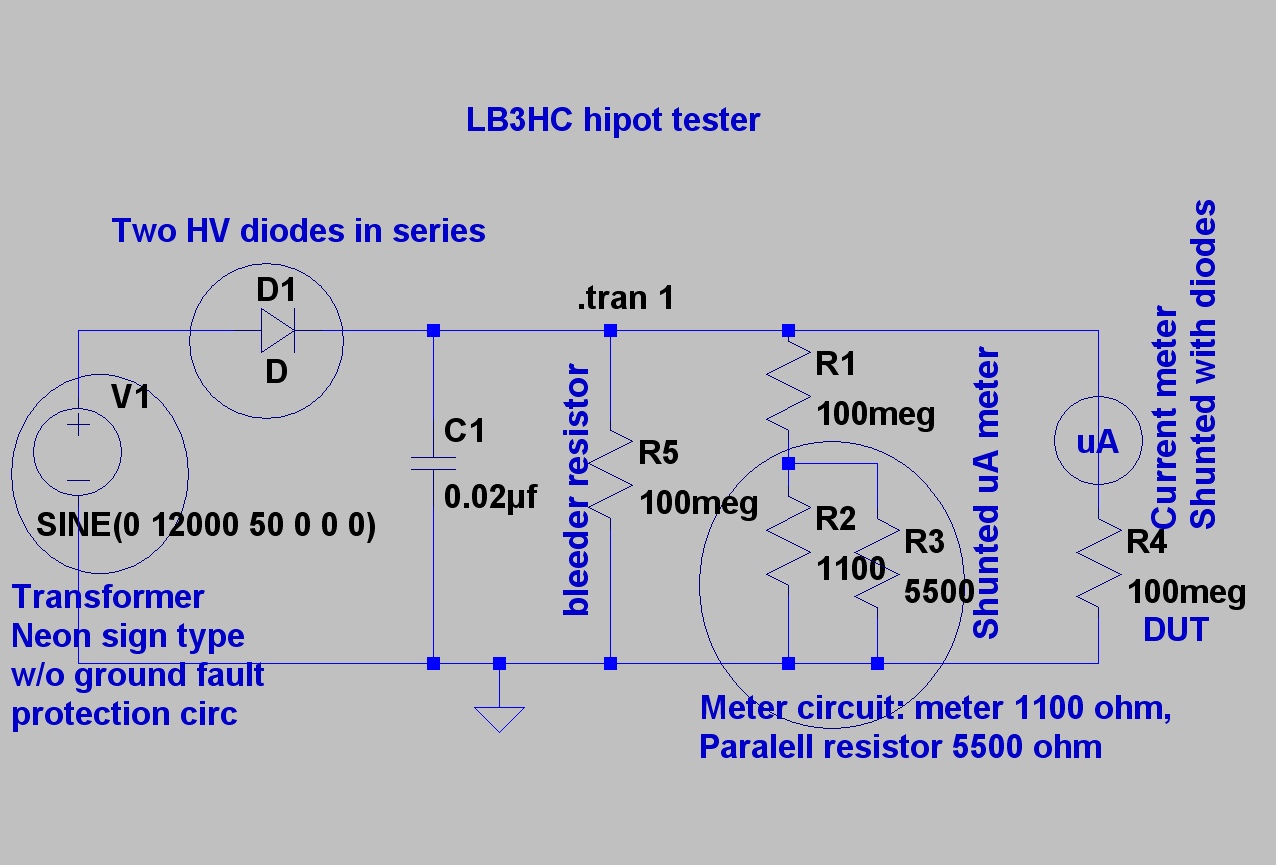
The design is based on concepts from K8CU and AG6K, but the circuit has been simplified and uses different components. The mechanical encapsulation has also been modified. LTspice was utilized to verify the tester prior to construction. The schematic...
Touch controls are not only utilized for switching devices on or off but can also manage various functions. A notable example is the TV remote control. When it is crucial to maintain activated functions for an extended period, employing...