
Unipolar Stepper Motor Controller Circuit

The integrated circuit operates as a stepper motor driver, capable of controlling motor functions with minimal external components. The two pins dedicated to motor control simplify the design and reduce the need for complex circuitry. The ability to drive 5, 6, or 8 wire stepper motors makes this circuit versatile for various applications. In 5 wire motors, the internal joining of common wires streamlines setup, while the 8 wire motors offer flexibility but require careful identification of coil connections.
The resistors R1 and R2 play a critical role in ensuring optimal performance when operating at higher voltages. They help in managing the current flow, which is essential for maintaining the integrity of the motor's operation at elevated speeds. The use of datasheets is crucial for understanding the specific requirements and limitations of the circuit, particularly regarding voltage ratings and resistance values.
The prevalence of six wire stepper motors in the market ensures accessibility for prototyping and experimentation. These motors are particularly suited for applications that demand reliable torque and precision, making them ideal for robotics, CNC machines, and various automation tasks. Repurposing components from obsolete dot matrix printers not only provides an economical solution for hobbyists and engineers but also contributes to sustainable practices by reusing electronic waste. The availability of additional components such as belts and gears enhances the potential for creating functional prototypes, facilitating hands-on learning and innovation in stepper motor applications.This is a very good integrated circuit. There is no need for any external glue logic to drive the circuit, there is only 2 pins to drive the motor, one for controlling the direction and the other to trigger the stepping pulses. It provides a very compact design that drives 5 or 6 or 8 wire stepper motors. The 5 or 8 wire stepper motors are treated as a variation on the 6 wire motor. That is, the 5 has the two common wires from the coils center taps joined inside the motor (saves joining them outside the motor), however some confusion may occur with the ends of the other coils as to which joins with which, however trial and error to determine this will not hurt anything. In the 8 wire motor case the joined center taps will have to worked out by you. You will know which coil is joined to which coil, however experimentation may be required to determine polarity.
The resistors R1 & R2 are only necessary if the supply voltage to the motors is above 10 volts or so, and are really only necessary near max voltages and tuning the response times of the motor for high speeds. See data sheets for details. There should be very little problem getting hold of six wire motors that make the connections obvious.
These motors are by far the most common where any degree of power is required, e. g. in printers. Non-working dot matrix printers are fairly common now-a-days and the motors in them are excellent starting points for experimentation. You will also get belts, pulleys and gears thrown in (may be even a power supply if your are adventurous).
🔗 External reference
Related Circuits
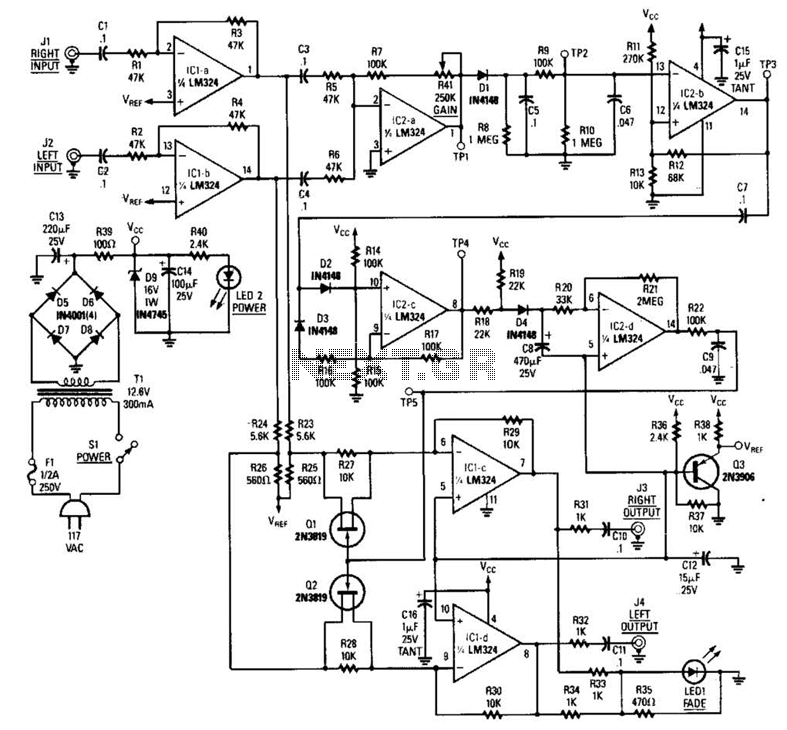
The LR inputs are summed, processed, and then drive a comparator. This comparator detects levels and generates transitions when audio inputs exceed or fall below predetermined thresholds. The frequency of these transitions, which correspond to rapid volume changes, is...

It utilizes the KD153 type "ding-dong" music integrated circuit (IC) to produce a "ding-dong" sound alarm. The reference number is 221611, and it is related to a refrigerator door alarm circuit. The KD153 integrated circuit is designed specifically for generating...
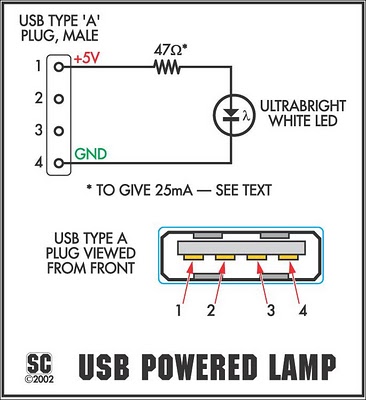
The device is referred to as the Itsy Bitsy USB Lamp. This concept is remarkably straightforward, raising the question of why it had not been conceived earlier. Originating as a student project at Massey University in Wellington, New Zealand,...

A simple touch dimmer circuit diagram using the TT6061 IC, which is a touch control integrated circuit used for light dimmer circuits and lamp dimmer circuits. The touch dimmer circuit utilizing the TT6061 IC is designed to provide a user-friendly...
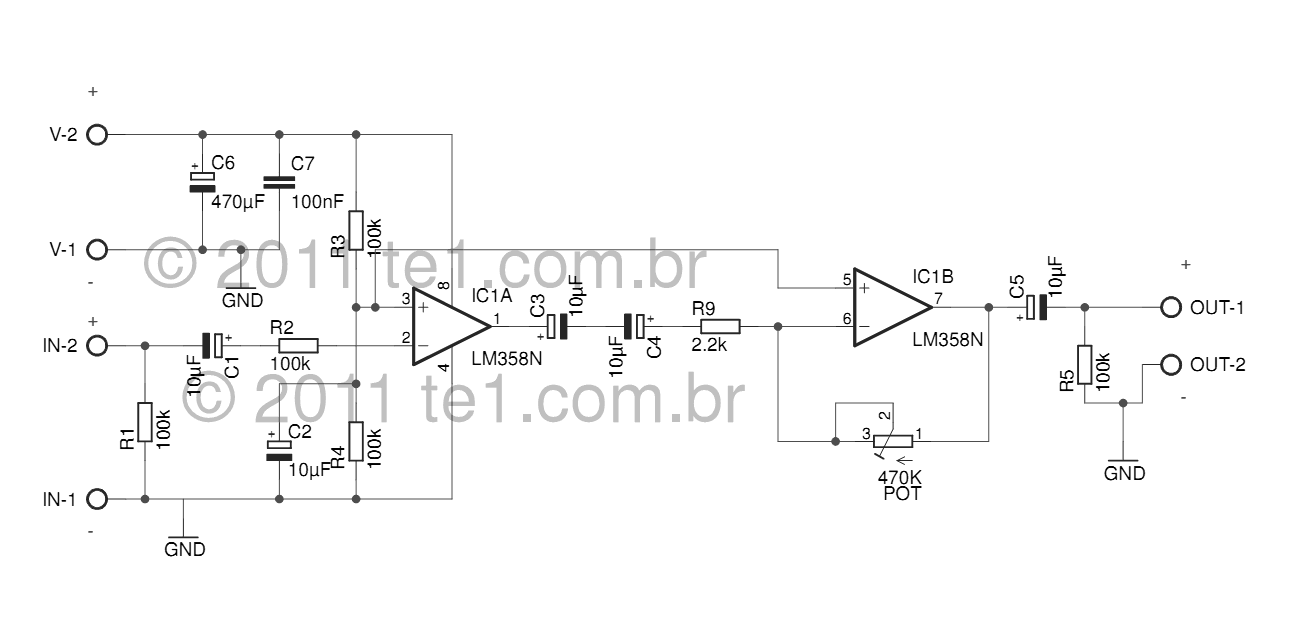
The LM358 series consists of two independent, high-gain, internally frequency-compensated operational amplifiers designed specifically to operate from a single power supply over a wide range of voltages. Operation from split power supplies is also possible, and the low power...
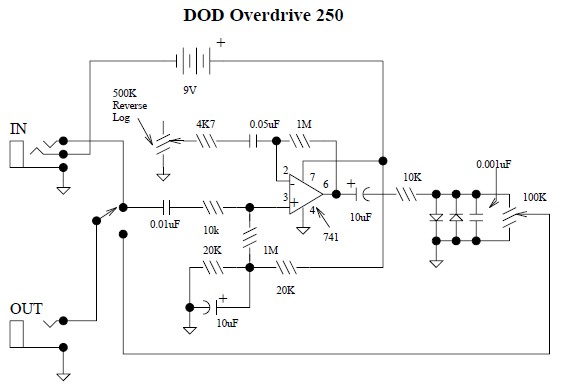
This document provides a circuit diagram for the DOD Overdrive 250 preamp. The DOD Overdrive 250 is similar to the MXR Distortion Plus and several other devices, utilizing a 741 operational amplifier with two diodes on the output channel....