
Voltage feedback closed loop speed control system

The MC33030 is an integrated circuit designed for driving DC motors, particularly in applications that require precise control of steering mechanisms. The circuit operates by utilizing a single-ended output configuration, which simplifies the driving process for the motor. The TIP42 power transistor is employed as a switch to manage the power supply to the DC motor, allowing for efficient operation and control.
In this setup, the motor generates a counter electromotive force (CEMF) when it operates, which can be measured at the motor terminals. This CEMF is an important feedback signal that indicates the motor's speed and load conditions. To effectively utilize this feedback, the signal is amplified and averaged over three pins to ensure stable and reliable readings. This averaging process helps to filter out noise and fluctuations that may occur during operation, providing a clearer representation of the motor's performance.
The integration of the MC33030 with the TIP42 transistor creates a robust system capable of handling various steering tasks. The control strategy can be further enhanced by implementing pulse-width modulation (PWM) techniques, allowing for finer control of the motor speed and torque. This is particularly useful in applications where precise steering adjustments are necessary, such as in robotics or automotive systems.
Overall, the combination of the MC33030 and the TIP42 transistor provides a versatile solution for DC motor control, particularly in steering applications, ensuring efficient operation and responsiveness to feedback signals.Another method is to elicit a motor counter electromotive force from the motor end of the associated signal after amplification averaged as 3 pins. By the drive output of A as a single-ended output, external TIP42 power transistor drive DC motor by controlling the power Gerbera. These two examples represent the MC33030 single steering motor applications. Another method is to elicit a motor counter electromotive force from the motor end of the associated signal after amplification averaged as 3 pins.
By the drive output of A as a single-ended output, external TIP42 power transistor drive DC motor by controlling the power Gerbera. These two examples represent the MC33030 single steering motor applications.
Related Circuits
This AC drill speed controller circuit schematic allows for the control of the drilling speed of a borer or drilling machine. This project is based on the principle that... The AC drill speed controller circuit is designed to modulate the...
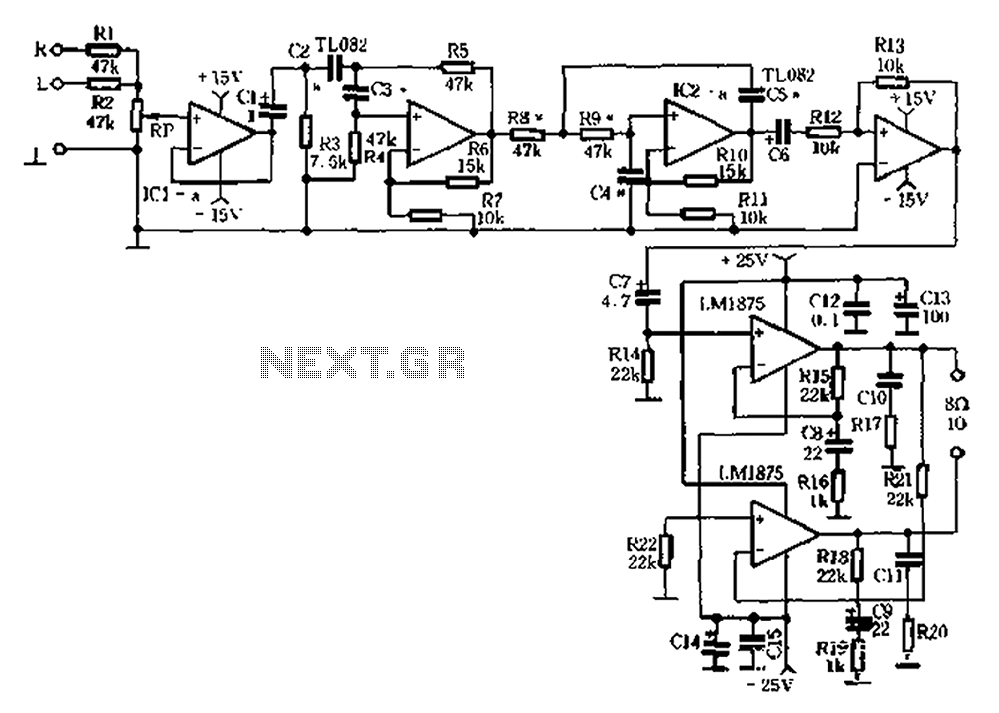
Audio equipment utilizes the left and right channel signal from the former speaker output terminals. The Rl and RZ mixed units are processed through a buffer (IC1a) before passing through a high and low pass filter. The filter employs...
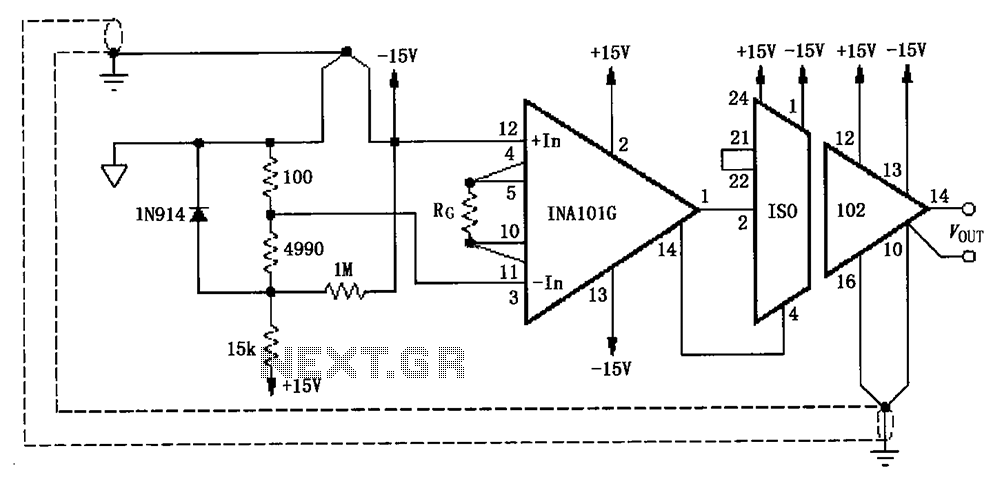
The circuit, as illustrated in the figure, consists of an ISO102 and an INA101 designed to eliminate ground loops and provide high-end cold junction compensation for a thermocouple amplifier. This configuration utilizes a K-type thermocouple to detect temperature at...

Motor Bike Headlight Controller Circuit. This circuit automatically turns a motorcycle's headlight on and off, independently of both the light and ignition switches, provided the battery is fully charged. The first stage... The motorcycle headlight controller circuit is designed to...

Many consumer electronic devices such as television sets, VCRs, CD players, and DVD players utilize infrared remote control technology. In certain situations, it is beneficial to extend the range of these remote controls. Infrared (IR) remote controls operate by emitting...
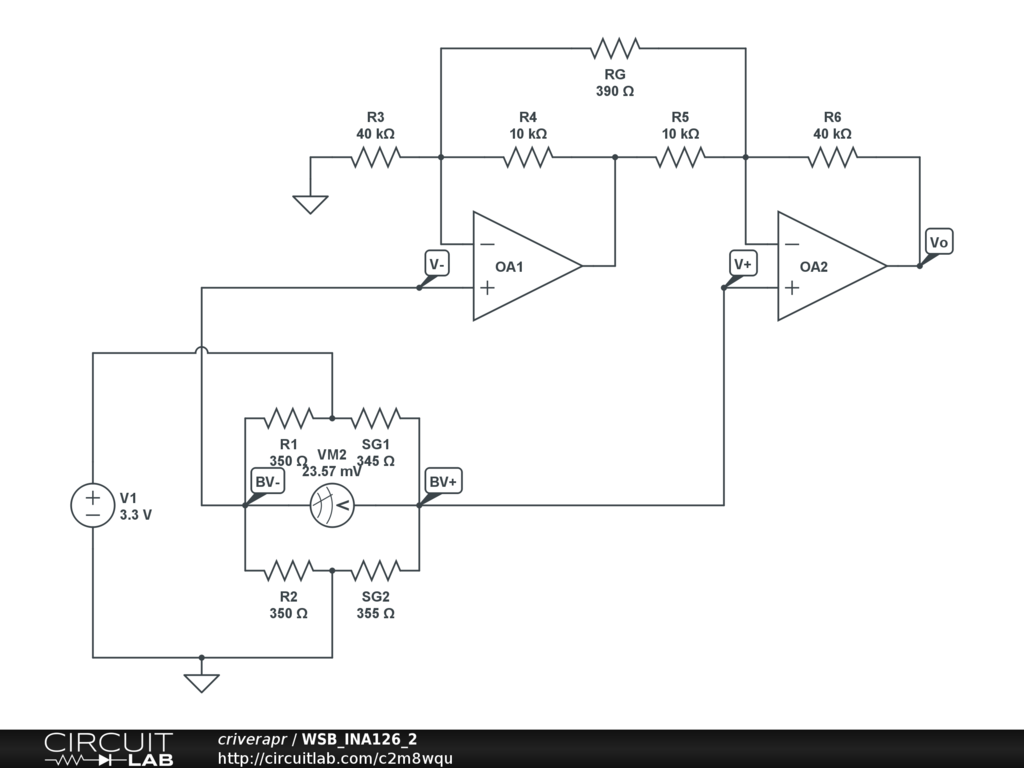
A half-bridge setup is utilized with strain gauges and an INA126 to amplify the voltage. The voltage can be read accurately when the lever is bent in one direction; however, no reading is obtained when the lever is bent...