
AVR Microcontroller Interface with Stepper Motor

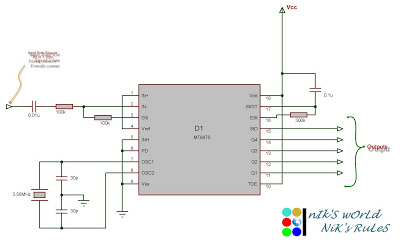
The ATmega8 microcontroller is a versatile 8-bit device from the AVR family, featuring 32 general-purpose I/O pins, 2 external interrupts, and a 10-bit ADC. It operates effectively at clock speeds of up to 16 MHz, but in this configuration, a 4 MHz crystal oscillator is used to provide a stable clock signal. This lower frequency can help reduce power consumption, making it suitable for battery-operated applications.
Unipolar stepper motors are characterized by having five or six wires, allowing them to be driven by energizing one phase at a time. This configuration simplifies the control logic and reduces the complexity of the driver circuitry. The stepper motor's rotation is achieved by sequentially energizing the coils, which creates a magnetic field that interacts with the rotor, causing it to move in discrete steps.
The ULN2003 is a popular choice for driving unipolar stepper motors due to its ability to handle high current loads and its built-in flyback diodes, which protect the circuit from voltage spikes generated when the motor coils are de-energized. The ULN2003 consists of seven Darlington pairs, allowing it to drive multiple motors or control multiple phases of a single stepper motor simultaneously. Each output can sink up to 500 mA of current, making it suitable for a wide range of stepper motor applications.
In this setup, the ATmega8 microcontroller is programmed to control the sequence in which the ULN2003 outputs are activated, thereby controlling the stepper motor's direction and speed. The microcontroller's GPIO pins are connected to the input pins of the ULN2003, which in turn are connected to the motor coils. This configuration enables precise control over the stepper motor's operation, allowing for accurate positioning and movement in various applications, such as robotics, CNC machinery, and automated systems.In this Tutorial we are using atmega8 with 4 MHZ Crystal and unipolar stepper motors, ULN2003 is Darlington pair driver I.C s used 🔗 External reference
Related Circuits

NOTE: There is no guarantee as to the suitability of said circuits and information for any purpose whatsoever other than as a self-training aid. I.E. If it blows your equipments, trashes your hard disc, wipes your backup, burns your...
There is an advantage in using continuously active PWM signals. The main reason is that the asynchronous frequencies of the PWM core and microcore can sometimes result in a shortened PWM pulse. The servo recognizes this as a command...
Connect the serial cable to the serial port. If using a USB to TTL, RS232, or serial converter, plug it into the USB port. Next, short the Tx pin to the Rx pin or the TxD pin to the...

The following circuit illustrates an N-Channel H-bridge motor drive circuit diagram. Features include low voltage motor drives utilizing N-channel MOSFETs. The N-Channel H-bridge motor drive circuit is designed to control the direction and speed of a DC motor using low...
This project provides a straightforward scientific calculator utilizing an AVR microcontroller. It features two keypads as illustrated in the circuit diagram, and the results are displayed accordingly. The scientific calculator circuit based on an AVR microcontroller is designed to perform...
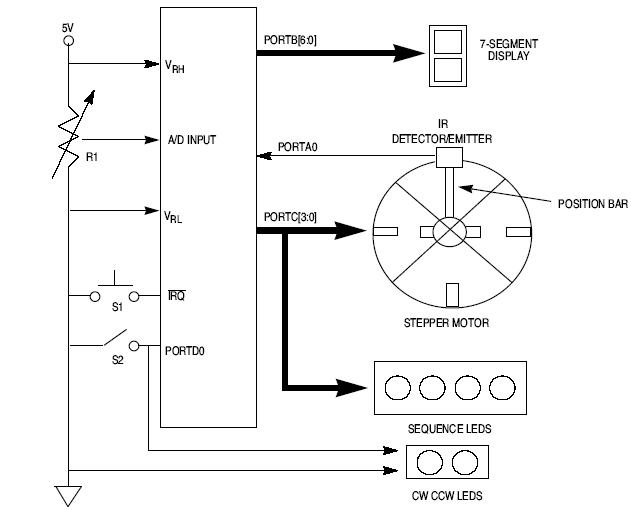
This article explains how to design a stepper motor system using an 8-bit Freescale microcontroller - MC68HC11E9. The design of a stepper motor system utilizing the 8-bit Freescale microcontroller MC68HC11E9 involves several key components and considerations to ensure effective control...