
C-52EVB Robot Controller

The MiniBoard is an embedded system based on the Motorola 68HC11 microcontroller, which is widely recognized for its versatility in robotics applications. This board is equipped with various input/output interfaces, allowing it to interact with sensors and actuators effectively. The design includes a robust driver circuit that facilitates the control of motors, essential for the movement of robotic systems.
The C-52 Evaluation Board (EVB) serves as an additional platform for developing robotic applications. It is equipped with features that support the integration of various sensors, particularly for line-following tasks, such as tracking black tape. This functionality is crucial for competitions where robots must autonomously navigate predefined paths.
In a competitive setting, participants are encouraged to build robots capable of following a line, utilizing the capabilities of the MiniBoard and C-52 EVB. The challenge not only promotes technical skills but also fosters creativity among students. The incentive structure, including a monetary prize and a social gathering, enhances engagement and motivation.
The circuitry of the MiniBoard typically includes power management components, signal conditioning circuits for sensor inputs, and H-bridge configurations to drive DC motors. The inclusion of these elements allows for precise control over the robot's movements and responses to environmental stimuli.
Overall, the MiniBoard and C-52 EVB represent a significant step in educational robotics, providing hands-on experience in circuit design, programming, and system integration for aspiring engineers and hobbyists.The MiniBoard, a Motorola 68HC11 Robot Controller board designed by Fred G. Martin, also uses this driver. The day after, I then decided to prepare the page describing how to use C-52 EVB as a robot controller board. I asked my student for competition, build yourselves robot that can track the black tape. Prize for the winner is 100 US$, with a bit condition that the winner must pay for a big party at Soi Jinda`s Somtum (Papaya Salad) shop.
And one of the competitor is me. I thought the rule should be conceived roughly by students and technically by me. The picture on that day will put here soon. 🔗 External reference
Related Circuits

A microcontroller is a single-chip computer that includes internal RAM, ROM, timers, counters, interrupt circuitry, I/O ports, analog comparators, serial USARTs, analog-to-digital converters, watchdog timers, and a RISC architecture. Unlike microprocessors, which require additional components such as RAM and...

This circuit utilizes a relay to control a water pump for automatic level regulation of a water reservoir or well. The shorter steel rod acts as a high water sensor, while the longer rod serves as a low water...

In many situations, a human interface is required for microcontroller projects. This example describes the interfacing of an AVR microcontroller with a standard PC AT keyboard. According to the keyboard timing diagram, the keyboard transfers data to the host...
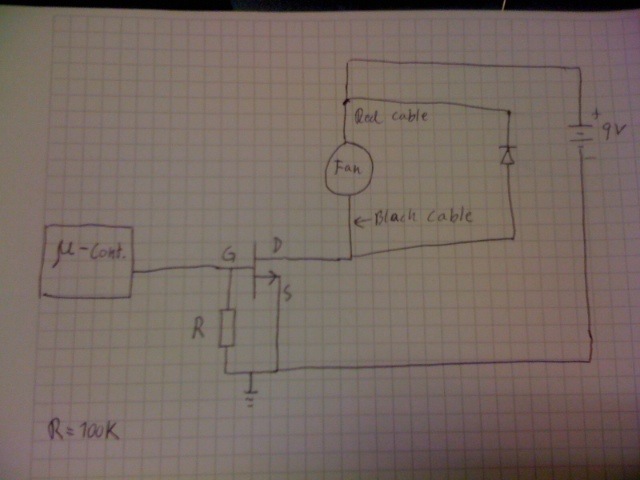
Control a fan using an LM34 temperature sensor and a computer fan with model number ASB0912L. A 2N7000 MOSFET transistor is utilized as a switch. The fan is intended to operate at a 35% duty cycle when the temperature...
Voltage regulator ICs from the 78xx series deliver a stable output voltage in contrast to a highly variable input supply, provided that the common terminal is grounded. Any voltage applied above zero volts (ground) to the common terminal is...
A stepper motor controller is required to operate a stepper motor, as a stepper motor cannot function merely by connecting it to a power supply. A stepper motor controller is an essential component for the effective operation of stepper...