
interfacing servo motor with 8051 using keil c
The provided code snippet includes the necessary instructions for controlling the servo motor through the 8051 microcontroller. The servo motor control is initiated by setting the motor_pin to low, followed by a loop that sequentially rotates the motor to 0 degrees, 90 degrees, and 180 degrees. Each position is achieved by sending a high signal to the motor_pin for a specific duration, determined by the Delay_servo function, which introduces a delay in microseconds. The main function executes this loop indefinitely, allowing continuous operation of the servo motor. The Delay function introduces a longer delay in milliseconds, while the Delay_servo function is designed for finer control of the servo's movement timing. This setup is essential for applications requiring precise angular positioning, ensuring that the servo motor operates smoothly and accurately within its defined range.A servo motor uses servoG‚ mechanism, which is a closed loop mechanism that uses position feedback to control the precise angular position of the shaft. Stepper Motors, which is an open loop system can also be used for precise angular control. But Servo Motors are preferred in angular motion applications such as robotic arm. G‚Moreover controlling of servo motors are very simple, easy and needs no extra hardware like stepper motor. Usually hobby circuit servo motors have three wires. Two of them are red and black which is used to give power to the motor and the third wire is used to provide control signal for angular position. It uses Pulse Width Modulated ( PWM ) waves as control signals. The angle of rotation is determined by the width of the pulse at the control pin. The servo motor used here is having angle of rotation from 0 to 180 degrees. We can control the exact angular position by varying the pulse betweenG‚1msG‚to 2ms. Before using this in your application, please refer the datasheet of your servo for angle and pulse width informations.
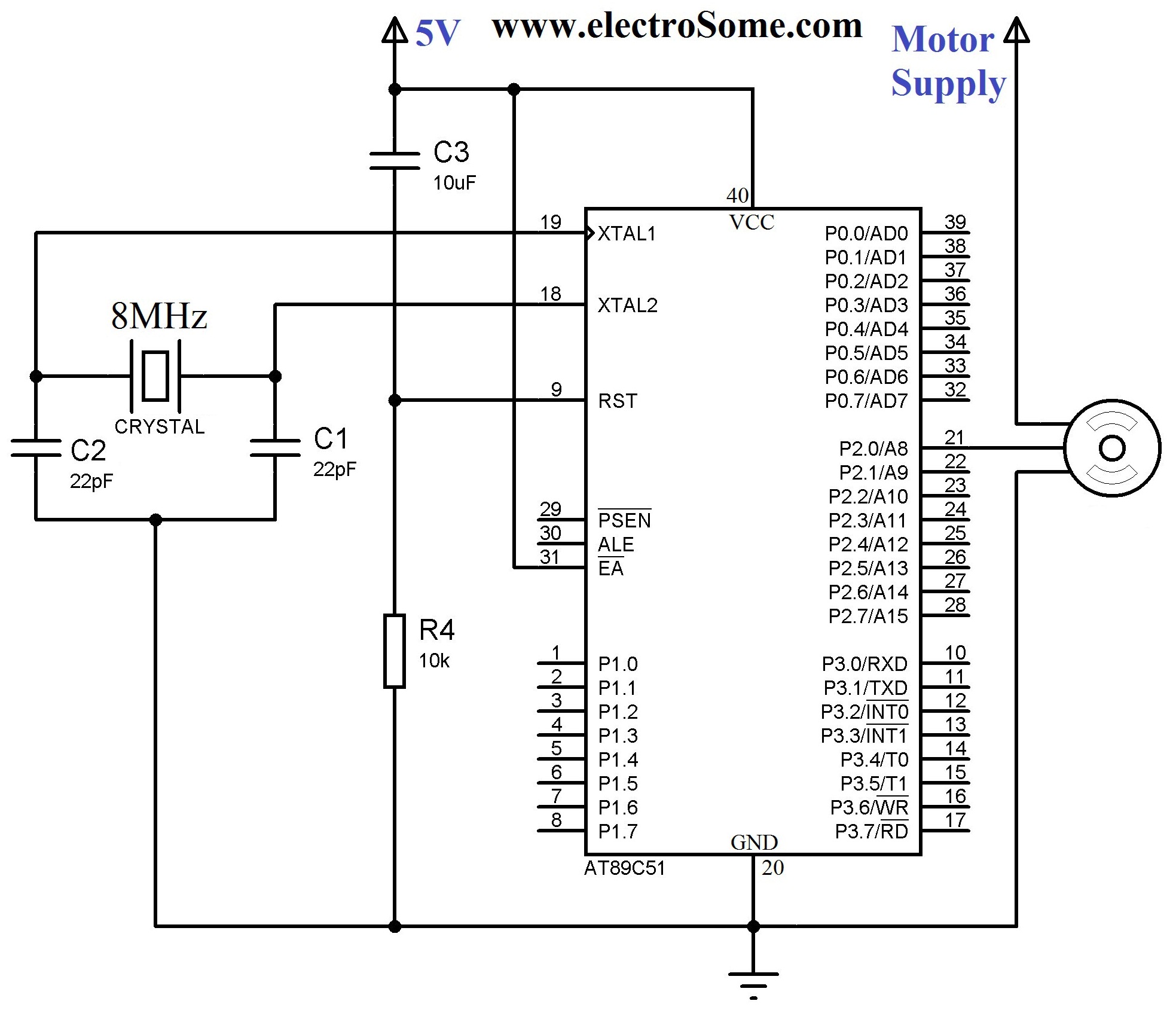
8MHz crystal is used to provide the required clock for 8051 microcontroller and 22pF capacitors are used to stabilize the operation of crystal. 10KG © resistor and 10G F capacitor is used to provide the required Power On Reset (POR) to the microcontroller.
Control of Servo Motor is connected to first pin of Port 2. #include
Related Circuits

General Diagram of Motor Controller Manual PDF Download. The motor controller is an essential component in various applications, including robotics, electric vehicles, and industrial machinery. It regulates the operation of electric motors by controlling parameters such as speed, direction, and...
The individual has been engaged in garden railroading for just over a year, utilizing skills from various hobbies. They have designed and built two scratch-built bridges and nearly 100 trestle bents to support a 200-foot main line. Their interests...
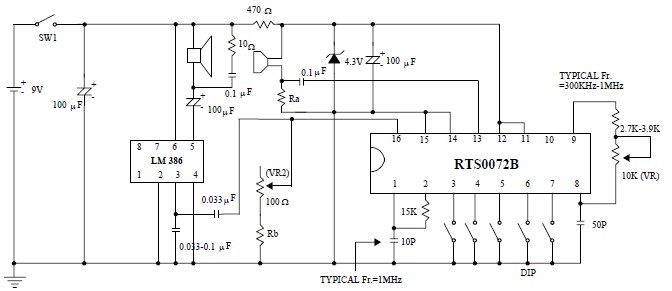
This voice changer circuit diagram is an electronic project developed using the RTS0072B single-chip CMOS LSI, specifically designed for voice-changing applications. It can transpose or distort one voice into another by encoding the input audio signals at normal speed...

This is a simple yet effective battery charger circuit utilizing the LM317 integrated circuit (IC). The circuit is designed for charging 12V lead-acid batteries and can be easily assembled on a general-purpose printed circuit board (PCB). The core component...
The initial program will sweep the servomotor from counterclockwise (CCW) to clockwise (CW) and then back again. The program is designed to illustrate the principles of controlling a servo using the PIC Basic language. The schematic is referenced in...

The super dimmer is an improved version compared to the standard dimmer currently in use. Testing its performance will provide a clearer understanding of its advantages. The super dimmer operates using advanced technology that allows for finer control over...