
Dc Motor-Speed Control

The described system utilizes the HA-2542 operational amplifier as a key component for speed regulation of a 12 V DC motor. The position encoder plays a crucial role by generating constant-width pulses that are integrated to create a reference voltage. This voltage is indicative of the motor's current speed and is essential for feedback control.
The operational amplifier functions in a closed-loop configuration, where the inverting input receives the reference voltage derived from the encoder pulses. The non-inverting input is set to a predetermined voltage that corresponds to the target speed of the motor. The operational amplifier compares these two voltages, and any discrepancy between them is processed to produce an output signal that adjusts the motor's drive voltage.
This feedback mechanism ensures that the motor operates at the desired speed by continuously monitoring its actual speed and making real-time adjustments. The capacitor C1 plays a vital role in smoothing out the pulse signal from the encoder, allowing for a more stable reference voltage. This design is particularly effective in applications requiring precise speed control, such as robotics, conveyor systems, and automated machinery.
The overall system architecture illustrates the integration of electronic components to achieve efficient motor control, highlighting the importance of feedback loops in maintaining desired operational parameters. The system shown consists of the HA-2542, a small 12-Vdc motor, and a position encoder. During operation, the encode r causes a series of "constant-width" pulses to charge CI. The integrated pulses develop a reference voltage, which is proportional to motor speed and is applied to the inverting input of HA-2542. The noninverting input is held at a constant voltage, which represents the desired motor speed. A difference between these two inputs will send a corrected drive signal to the motor, which completes the speed control system loop.
Related Circuits
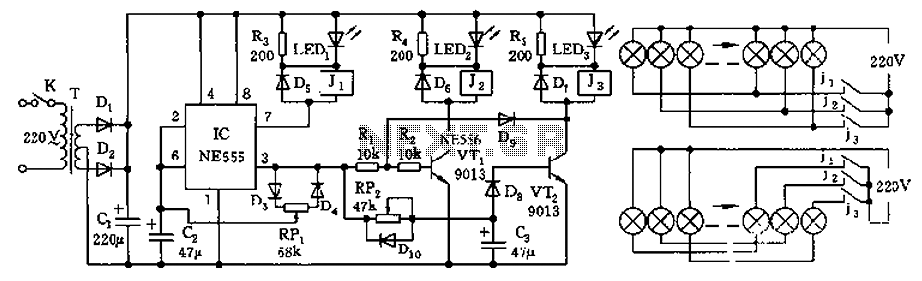
The controller features a buck rectifier circuit utilizing a 555 multivibrator, designed for controlling approximately 220V, 5W low-power parallel lights or 6 to 12V small bulb series. The 555 timer, along with components D3, D4, RP1, and C2, forms...
This tutorial explains how to read the content of a microcontroller's flash memory. The source microcontroller reads the memory content and displays it on the LEDs. The content consists of the program stored in the microcontroller's memory. This step...
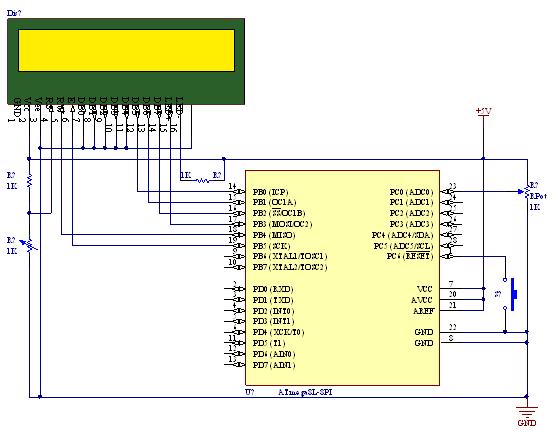
A straightforward tutorial on utilizing the ADC (Analog to Digital Converter) unit of the AVR microcontroller, demonstrated with the Atmega8, including a circuit diagram and code examples. The ADC unit in the Atmega8 microcontroller is a crucial component that allows...
Fans can be controlled remotely with a switch that allows for speed adjustments, and this remote control can also be integrated with other household switches. Its primary feature is the use of a sub-transmission ultrasonic transmitter, which operates without...
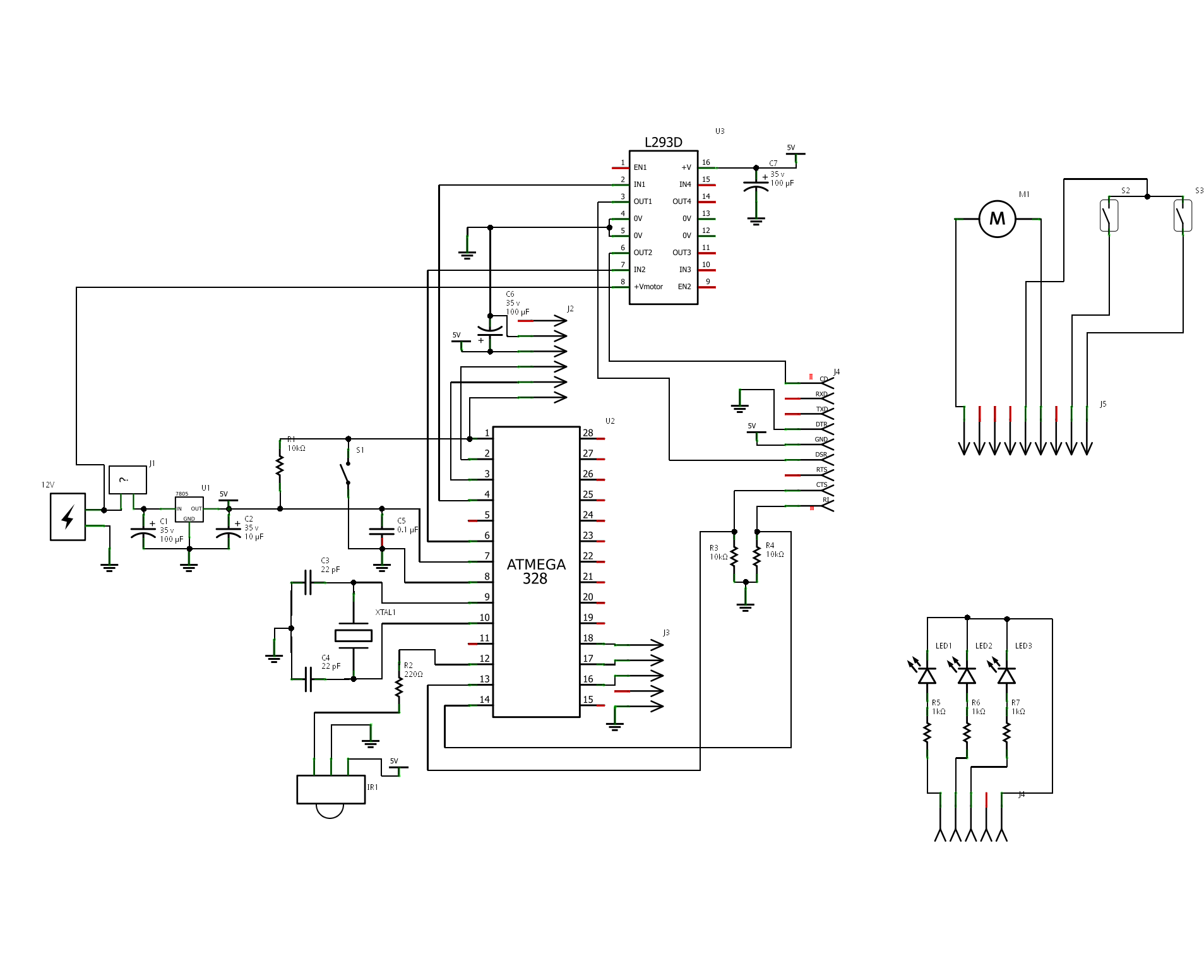
The project is "Motorized Curtain" with Remote control. It is made up of MCU ATMEGA328 with Arduino BootLoader, motor driver L293D (I used L293B with external diodes, because I couldn't find L293D), IR Receiver TSOP 1738, DC Motor from...
This circuit is designed to switch on or off any home or industrial appliance using a TV or DVD remote controller. The circuit can be operated up to a distance. The circuit utilizes an infrared (IR) receiver module, which detects...