
DMX Sequenced Servos

The proposed circuit design leverages the capabilities of the Propeller microcontroller, which is known for its multitasking abilities and versatility in handling multiple inputs and outputs. The circuit can be structured to include a DMX512 interface, allowing for the transmission and reception of DMX signals. This interface will enable the Propeller to interpret DMX commands and convert them into control signals for various actuators.
To implement this, the circuit will consist of a DMX receiver module connected to the Propeller's GPIO pins. The receiver will decode the DMX signals, which will then be processed by the Propeller to control actuators such as DC motors, stepper motors, and servos. Each actuator can be assigned a unique DMX address, allowing for precise control over multiple devices from a single control source.
The output stage of the circuit will include driver circuits tailored to the specific types of actuators being controlled. For instance, H-bridge circuits can be utilized for DC motors to allow bidirectional control, while PWM (Pulse Width Modulation) signals can be used for servos to dictate their position accurately. Solenoids can be controlled through relay modules that switch the power supply on and off as needed.
In addition, the circuit should incorporate adequate power supply management to ensure that the actuators receive sufficient voltage and current without compromising the stability of the Propeller microcontroller. Proper decoupling capacitors and voltage regulators may be employed to maintain a clean power supply.
Furthermore, safety features such as current sensing and thermal protection can be integrated into the design to prevent damage to the actuators and the microcontroller. Overall, this circuit aims to provide a robust solution for controlling a variety of actuators using DMX sequencing, expanding the applications of DMX technology beyond traditional lighting control.I was inspired by the excellent work done by others on these boards using DMX sequencing and various parallax products to interface with them. I decided to take my crack at it using the propeller only with a slightly different spin, pun intended.
I decided rather than control lights, why can`t I control motors, solenoids, servos, or other kinds of actuators? I spent some time analyzing a free software called vixen which others have pointed out as a great tool.
Since all I need are the.. 🔗 External reference
Related Circuits
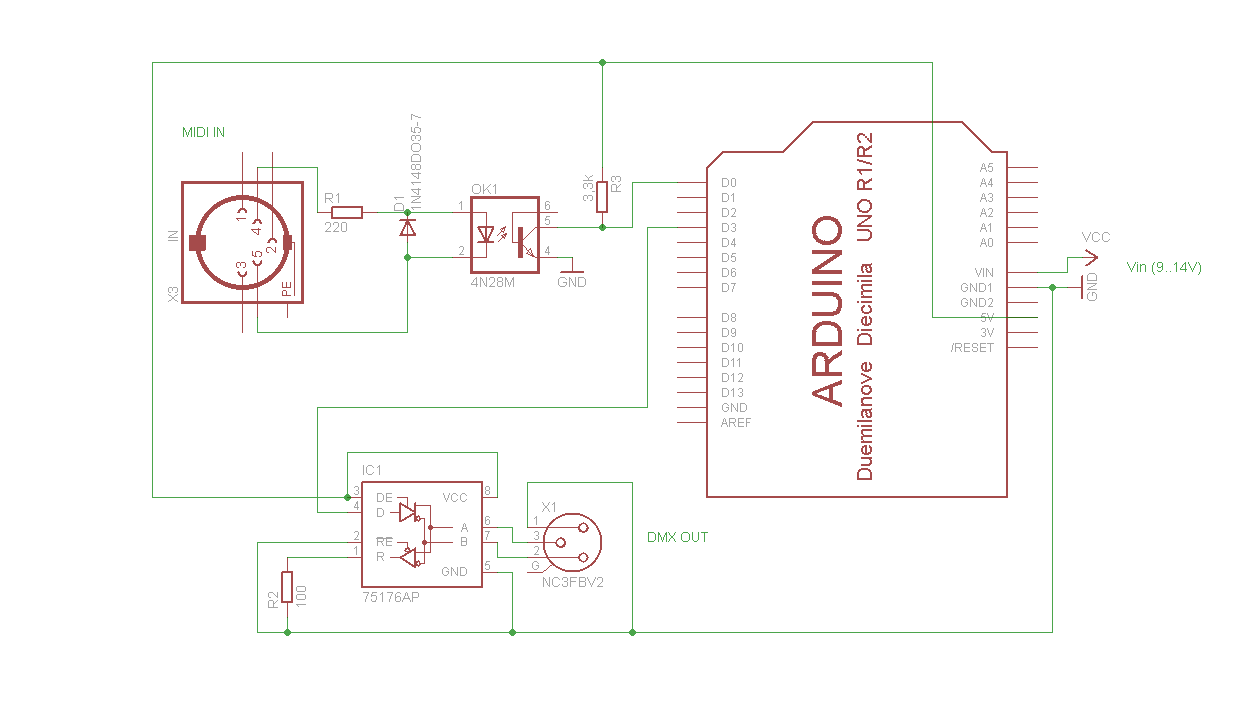
A simple Arduino MIDI-to-DMX control was created for a robot band named Science Fiction Children. The setup consists of two inexpensive LED Par56 lights from Stairville, a basic DMX dimmer pack, and Ableton Live for sound management. The objective...
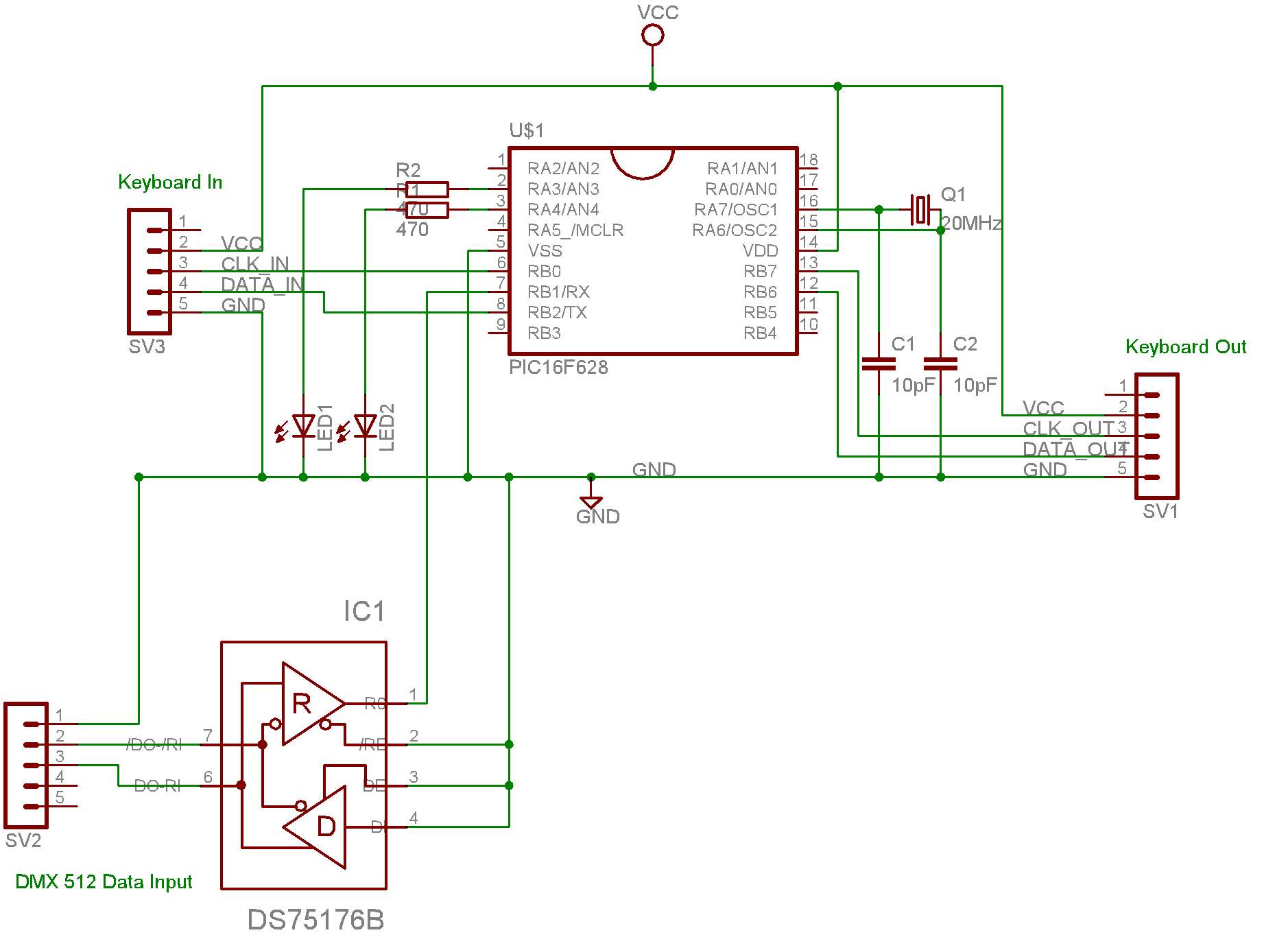
This circuit is designed to produce DMX output for entertainment lighting from a PC. It offers flexibility in circuit configurations. By opting for no isolation, the setup requires only a PIC microcontroller and a standard RS-485 driver, with an...
This system is designed for use with a PC connected to video projectors, enabling a lighting controller to manage a presentation displayed on the video screen. The PC used for the presentation is situated in a different location from...
Circuit to control RC servos using 0-10V control voltage This circuit is designed to control RC servos by utilizing a control voltage range of 0 to 10 volts. The operation of the circuit is based on the principle of converting...
The circuit is designed to fit snugly, eliminating the need for adhesive. It is recommended to test the fit multiple times, making incremental adjustments until a snug but movable fit is achieved. The entire circuit should be placed inside...

A servo consists of a small motor and gear mechanism that rotates a shaft to a precise location and maintains that position. The image displays a typical servo with its cover removed. The shaft's position is controlled by a...