
Line Following Auto Robot

The line-following autonomous robot utilizes the AT89C2051 microcontroller, a widely recognized 8-bit microcontroller known for its compact design and efficiency in handling real-time control tasks. The core functionality of the robot is based on the principle of line detection using infrared (IR) sensors. These sensors are strategically placed to detect the contrast between the black line and the surrounding white surface. When the IR sensor detects the white surface, the reflected infrared light indicates the absence of a line, while the detection of a black line results in minimal or no reflection.
The AT89C2051 microcontroller is equipped with 20 pins, which are utilized for various functionalities including input and output operations, motor control, and sensor interfacing. The microcontroller processes the signals received from the IR sensors and executes the control logic necessary to drive the motors. The motors are typically DC motors, which are connected to the microcontroller through driver circuits that allow for directional control and speed modulation.
The robot's movement is dictated by the logic programmed into the AT89C2051. When the IR sensors detect the black line, the microcontroller sends signals to adjust the motor speeds accordingly, enabling the robot to follow the line seamlessly. For instance, if the left sensor detects the line while the right sensor does not, the microcontroller will slow down the left motor and speed up the right motor, causing the robot to turn right and realign with the line.
In addition to the core components, power supply considerations are crucial for the operation of the robot. A battery pack is generally used to provide the necessary voltage and current to the microcontroller and motors. Proper voltage regulation and filtering are essential to ensure stable operation and prevent noise interference that could affect sensor readings.
Overall, the design of the line-following autonomous robot demonstrates the integration of sensor technology, microcontroller programming, and motor control, showcasing a practical application of electronics engineering principles in robotics.This Project Line Following Autonomous Robot is based on 8 bit Microcontroller AT89C2051. This Robot follows the black line which is drawn over the white surface or it follows the white line which is drawn over the black surface. The infrared sensors are used to sense the line. When the infrared signal falls on the white surface, it gets reflected and if it falls on the black surface, it is not reflected this principle is used to scan the Lines for the Robot.
All the above systems are controlled by the Microcontroller. In our project we are using the popular 8 bit microcontroller AT89C2051. It is a 20 pin microcontroller. The Microcontroller AT89C2051 is used to control the motors. It gets the signals from th 🔗 External reference
Related Circuits
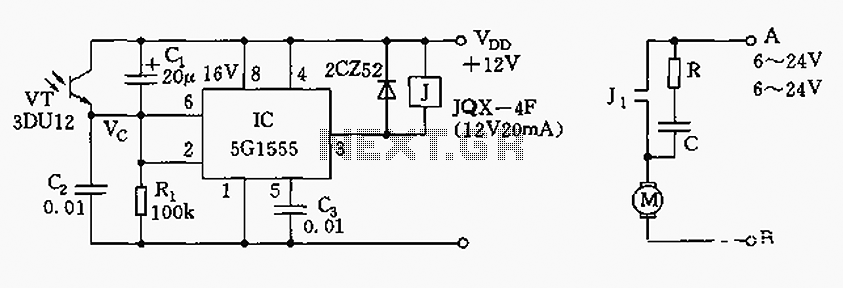
The control circuit consists of an NE555 timer and a phototransistor, along with resistors R1, capacitors C1 and C2, among other components. The photodiodes 3DU12 respond to sunlight by decreasing their resistance, which causes the voltage at the 555...
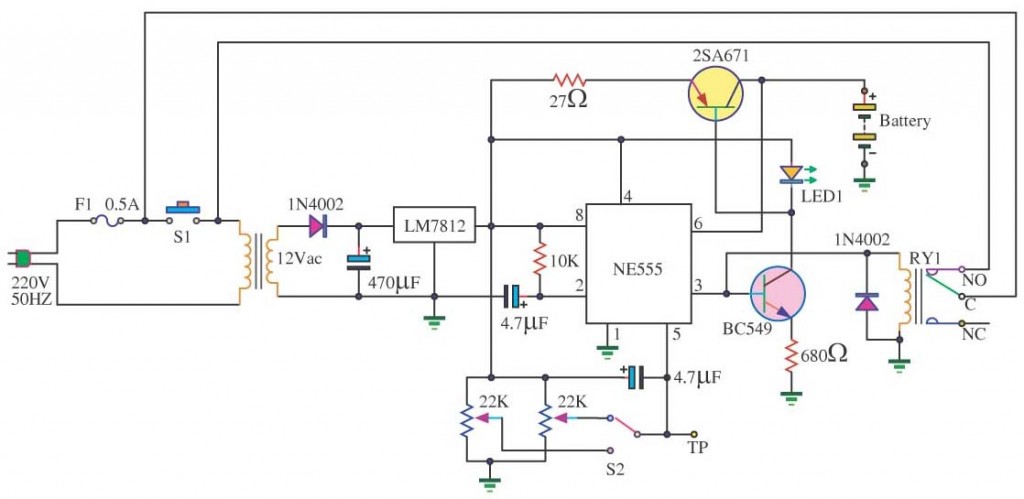
In a lithium-ion cell, a voltage of 3.8V per cell indicates a state of charge of approximately 50%. It is important to note that using voltage as a fuel gauge is not precise, as cells manufactured by different companies...
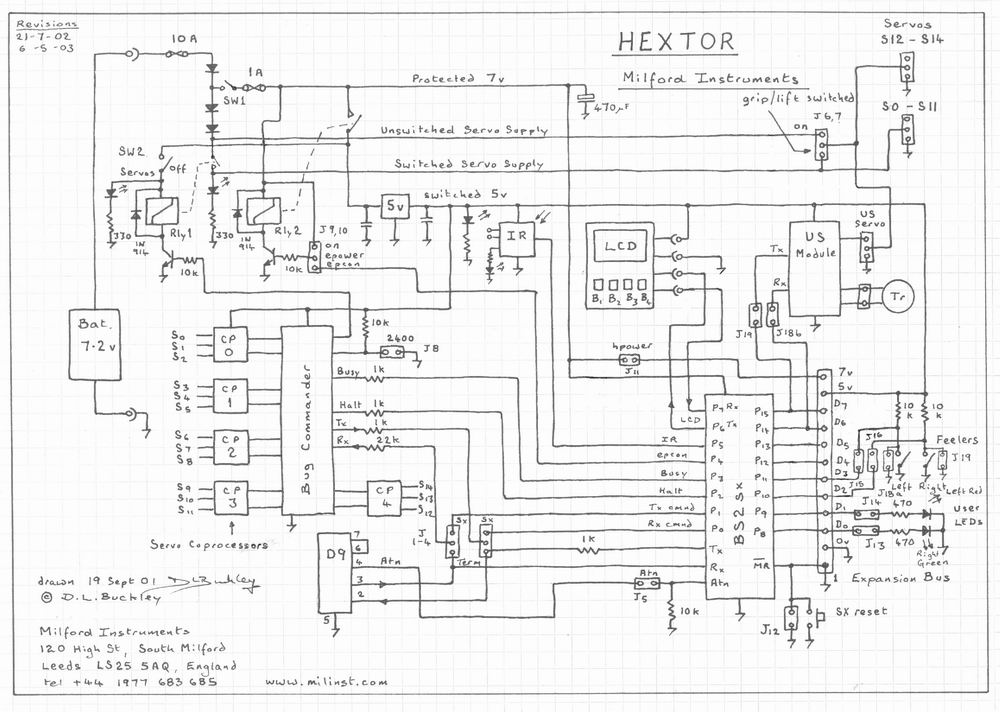
The circuit includes multiple connections for a BOS (Basic Operating System) processor. It has a serial connection for transmitting data to the BOS processor (pin 0) and receiving data from it (pin 1). Pin 2 is used to supply...

Detects the presence of a live mains conductor. Minimum parts counting. If the unit is brought close to a live conductor (insulated, and even buried in plaster) capacitive coupling between the live conductor and the probe clocks the counter,...
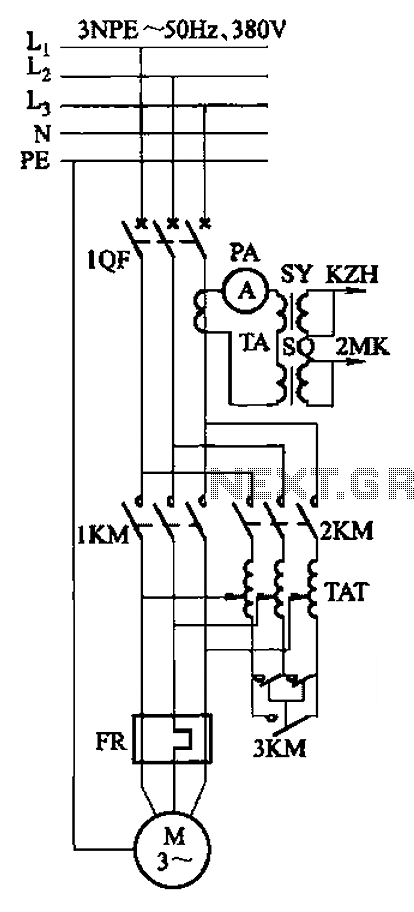
Autotransformer voltage starting, with an adjustable starting time of 30-60 seconds. It includes the SDJ electrode liquid level sensor of HJ-13 type, a pump control system box of HKD-21B type, 1MK level modules adopted by HKG-1SG type, 2MK start...
To achieve optimal audio reproduction at varying listening levels, it is essential to adjust tone control settings to align with the established characteristics of human auditory perception. The sensitivity of the human ear changes non-linearly across the entire audible...