
line following robot using pic16f84

The JavaBot1 employs a differential drive mechanism, which allows it to maneuver effectively along the designated path. The robot is equipped with infrared (IR) sensors that detect the contrast between the black line and the surrounding surface. These sensors are strategically positioned at the front of the robot to ensure accurate detection of the line's edges.
The control system of the JavaBot1 consists of a microcontroller that processes the signals from the IR sensors. Based on the readings, the microcontroller adjusts the speed and direction of the motors driving the wheels. For instance, if the left sensor detects the black line, the right motor will speed up to turn the robot back onto the line, and vice versa.
Power for the JavaBot1 is supplied by a rechargeable battery pack, ensuring portability and ease of use. The robot's chassis is constructed from lightweight materials to enhance speed and maneuverability while maintaining structural integrity.
In terms of programming, the JavaBot1 can be configured using a simple algorithm that enables it to follow the line efficiently. This algorithm can be modified to improve performance on different surfaces or to handle more complex line patterns.
Overall, the JavaBot1 serves as an educational tool for demonstrating basic robotics principles, including sensor integration, motor control, and algorithmic programming, making it an ideal project for students and hobbyists interested in robotics and electronics.Design Goal: The JavaBot1 is a small line following robot designed to follow a black line drawn on a dry erase board. It is designed to follow very tight c.. 🔗 External reference
Related Circuits
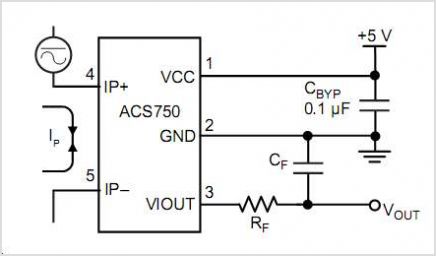
The AD537 is a monolithic voltage-to-frequency (V-F) converter that includes an input amplifier, a precision oscillator system, an accurate internal reference generator, and a high-current output stage. A single external resistor-capacitor (RC) network is sufficient to configure any full-scale...

The i-St@r presents a simple mini audio amplifier circuit schematic utilizing the LM386 low voltage audio power amplifier IC. This circuit is designed to power medium-sized speakers from a music player that typically drives only earphones (LM386 headphone). The...
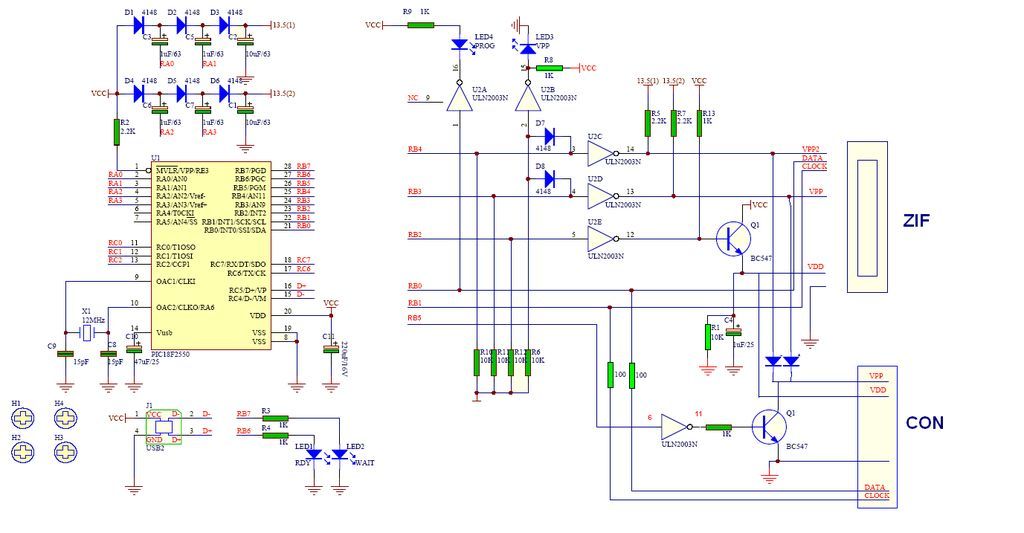
GTP USB PIC Programmer (Open Source). This project includes the GTP USB (not plus or lite). The schematic, photos, and PCB have been developed by PICMASTERS. The GTP USB PIC Programmer is an open-source device designed for programming PIC microcontrollers...

Some amplifier is based around a RF transistor. In my case I will use a common NPN RF transistor called 2SC1970. You can also use other transistors like 2N4427 and some others. Check datasheets to see how much power...
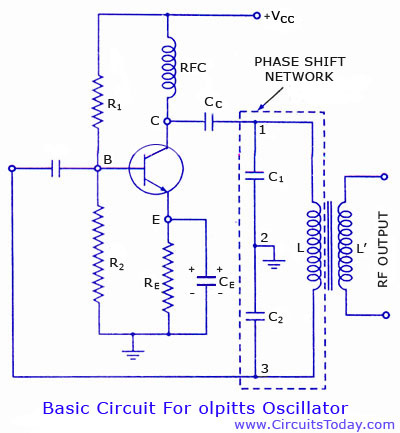
Colpitts oscillator circuit diagram and theory. Colpitts oscillator frequency equation. Colpitts oscillator using transistor. Colpitts oscillator using op-amp. The Colpitts oscillator is a type of electronic oscillator that generates sine waves and is widely used in various applications such as...
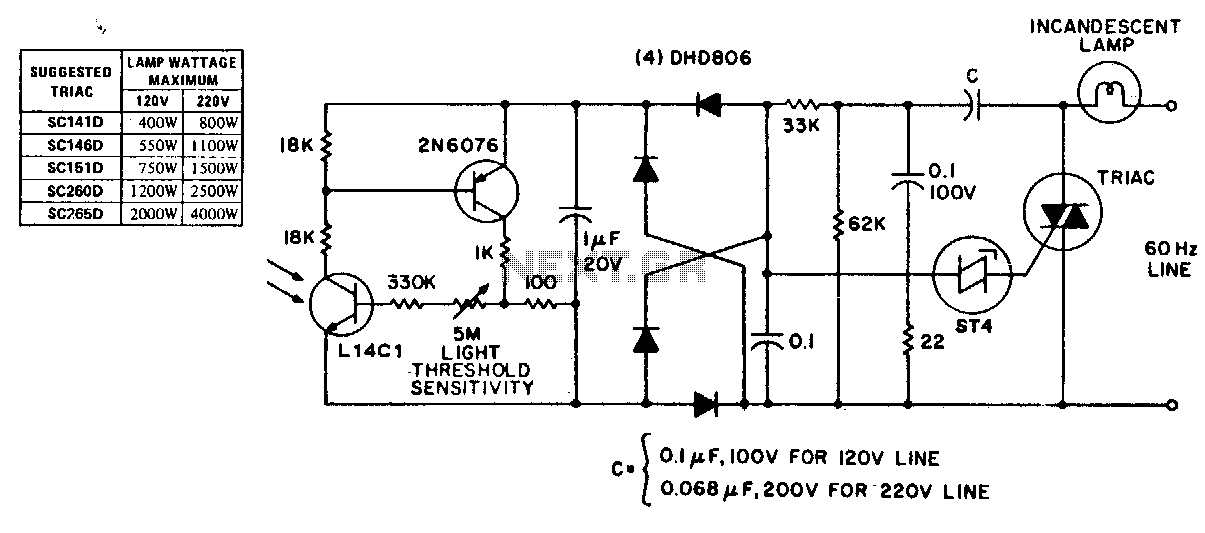
This circuit exhibits stable threshold characteristics based on the photo-diode current in the Ll4Cl, which generates a base-emitter voltage drop across the sensitivity setting resistor. The double phase shift network that supplies voltage to the ST-4 trigger ensures triac...