
maze robot sensor integration

The project involved the integration of Sharp infrared distance sensors into the existing Surveyor robotic platform to enhance its navigation capabilities in a maze environment. The primary objective was to convert the analog outputs from the Sharp IR sensors into digital signals that the Surveyor could process. The selected microcontroller, the PIC18LF2221, features a low operating voltage, making it compatible with the 3.3V requirements of the Surveyor. This microcontroller is equipped with multiple analog and digital I/O pins, allowing for efficient communication with the sensors.
The core of the design revolves around utilizing PWM signals to represent the distance information derived from the analog outputs of the IR sensors. By establishing a linear correlation between the pulse width and the measured voltage, the system can effectively convey the distance to the Surveyor's processing unit. The decision to consolidate the sensor outputs into a single PWM channel reflects a strategic approach to mitigate the limitations encountered with the Surveyor's input handling capabilities. This innovative solution demonstrates adaptability and resourcefulness in overcoming technical obstacles inherent in robotics projects.
The implementation of this system not only illustrates the practical application of engineering principles but also highlights the importance of collaboration and iterative problem-solving in the development of complex robotic systems. The successful navigation of the maze using this enhanced sensor integration showcases the effectiveness of the chosen methodologies and the adaptability required in engineering design processes.This project was completed during a course on robotics taught by Prof. Dave Barret at Olin College. The final project for the course, the goal of the project was to navigate a maze using a Surveyor robotic platform. As part of this project, additional sensors were added to the robot. This writeup will focus on the addition of the sensors because t hey illustrate an example of engineering problem solving skills as we extended the capability of a platform beyond its original design. This project was completed with collaboration from Leif Jentoft. The challenge of this final project was that the surveyor platform only contained a single sensor, a video camera.
Furthermore, the platforms were running a parallel programming language called Occam Pi that made making the maze solving algorithms pretty easy, but adding sensors difficult. Because of the distinct difference between the colors of the walls of the maze and floor, a color differentiation algorithm using the camera could be successful in navigating the maze.
All of the other teams chose to take this approach. While a few of the teams did have success with this approach, we chose to install a few Sharp infrared distance sensors instead. We knew from the beginning that there were significant issues with this approach. Like most sensors, the Sharp IR distance sensors that we were trying to use output only analog voltages between a low voltage (almost zero) and the high power rail.
The Surveyor used a Blackfin DSP chip as its CPU. By design, it was limited to having only digital inputs so we needed to provide the Surveyor with some sort of digital values so that we could use IR distance sensors to help us navigate the maze. The Occam SDK for the Surveyor platform could not yet read serial values at the beginning of the project.
While this functionality was added to the SDK midway through the project, it was too late for us to use. For this kind of application, there were many choices of applicable micro-controllers. Because I had worked with a PIC extensively in the past and my collaborator was also very familiar with PICs as well as the C code used to write code for them, we chose to use a PIC over other available solutions.
ThePIC we wanted was a PIC16F690; it accepted a wide range of voltage inputs and had everything we need in a very small package. On the downside, Microchip (the company who made this PIC) didn`t offer a free compiler to use this PIC16 series controllers and we were unwilling to take the time to figure out how to use third party libraries.
For that reason we opted to use an overpowered PIC18F series PIC. Because the Surveyor used 3. 3V and not the more standard 5v as its source, we needed to use a low voltage PIC to ensure proper operation. We opted to use a PIC18LF2221 because it had built in math functions, plenty of analog and digital IO pins and an internal oscillator that we could use to clock the PIC.
The LF indicates that it can be used at lower voltages. The plan was to use the PIC to translate the analog output from the IR distance sensors into a PWM (pulse width-modulated) signal. Because both the Surveyor and the PIC had processors that were clocked, we could effectively translate the analog signal into a digital pulse.
We chose a linear relationship between the length of the pulse and the voltage to help determine the distance. Because there were problems changing inputs and accessing different digital inputs on the Surveyor, we changed our initial conceptual design from one PWM signal line per sensor to a scheme that used inputs to tell what sensor was being read and then had the value sent along one PWM channel that was used by all the sensors.
We considered this part of the design to be a work-around for a bug that was either in the base code of the Surveyor`s Occam Pi based code or in the hardware itself. Because we didn`t have another robot to debug on, or much time to figure th 🔗 External reference
Related Circuits
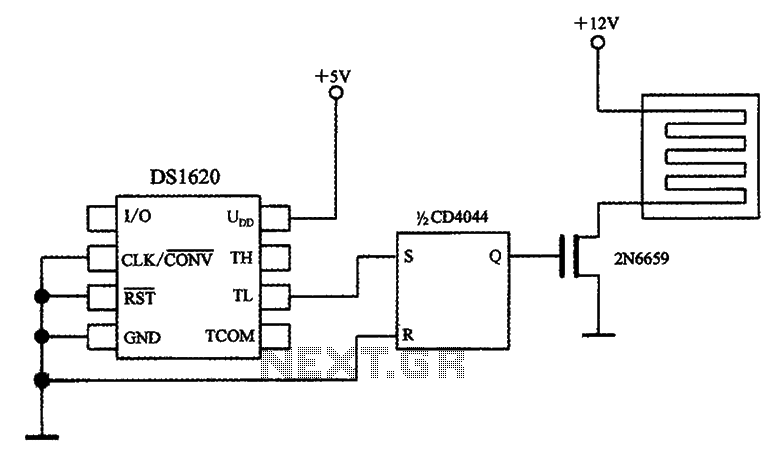
The circuit involves a smart temperature control system utilizing DS1620 temperature sensors with a three-wire serial interface for managing a small electric heater. When the CD4044 type RS flip-flop is set to 1, the output Q becomes high, which...
This is a microcontroller hobby project featuring a line-following mobile robot named "Cruddy." The name reflects the somewhat messy structure of the robot. As a first-time builder, the soldering skills may not be fully developed. The chassis was sourced...

Passive human body infrared sensor circuits are generally similar in design, although some may have fewer stages. The circuit illustrated is sourced from the NICERA manufacturer and is considered a classic example. The front-end stage consists of a low-frequency...
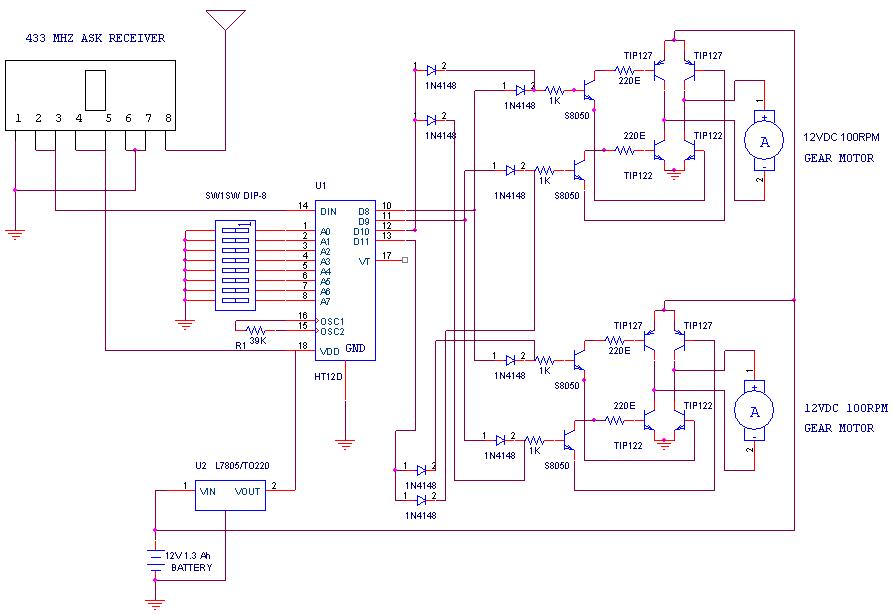
A remote-operated spy robot circuit can be controlled using a wireless remote controller. It captures audio and video information from the surroundings and transmits this data to a remote station via RF signals, with a maximum range of 125...
After completing the robot for the competition, updates to the blog were paused due to disappointment over not finishing the robot on time. An update on the progress made thus far is being provided. The motor driver was changed...
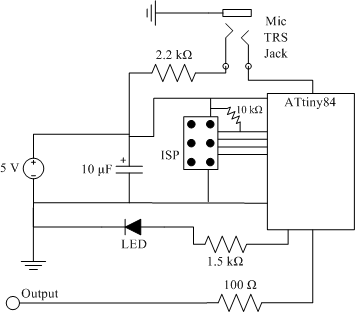
The clap sensor is a straightforward circuit that consists of a PC microphone, a microcontroller, and an output. The circuit design features the ATtiny84 microcontroller, chosen for familiarity with the AVR architecture and accessibility to necessary tools. The ATtiny84...