
Motion Detector with PIR Sensor

This electronic circuit is designed around the PIC18F25K20 microcontroller, which serves as the central processing unit. The microcontroller is programmed to monitor a passive infrared (PIR) sensor, which detects motion by measuring changes in infrared radiation. When the PIR sensor detects movement, it triggers an interrupt, allowing the microcontroller to respond swiftly.
The initial battery voltage check at startup is crucial for ensuring that the system operates within its specified voltage range. This feature helps prevent unexpected behavior due to low battery conditions. The microcontroller's firmware includes a routine to read the analog voltage level from the battery, ensuring that it is sufficient for operation.
The use of an RC delay filter composed of resistor R6 and capacitor C1 is essential for stabilizing the signal from the PIR sensor. This filter smooths out transient spikes or noise that may occur when the sensor detects motion. The time constant of the RC circuit, calculated using the formula τ = R × C, determines the duration of the delay. This delay is critical for allowing the microcontroller to settle into a known state before processing sensor inputs, thereby reducing the likelihood of erroneous readings that could lead to circuit malfunction.
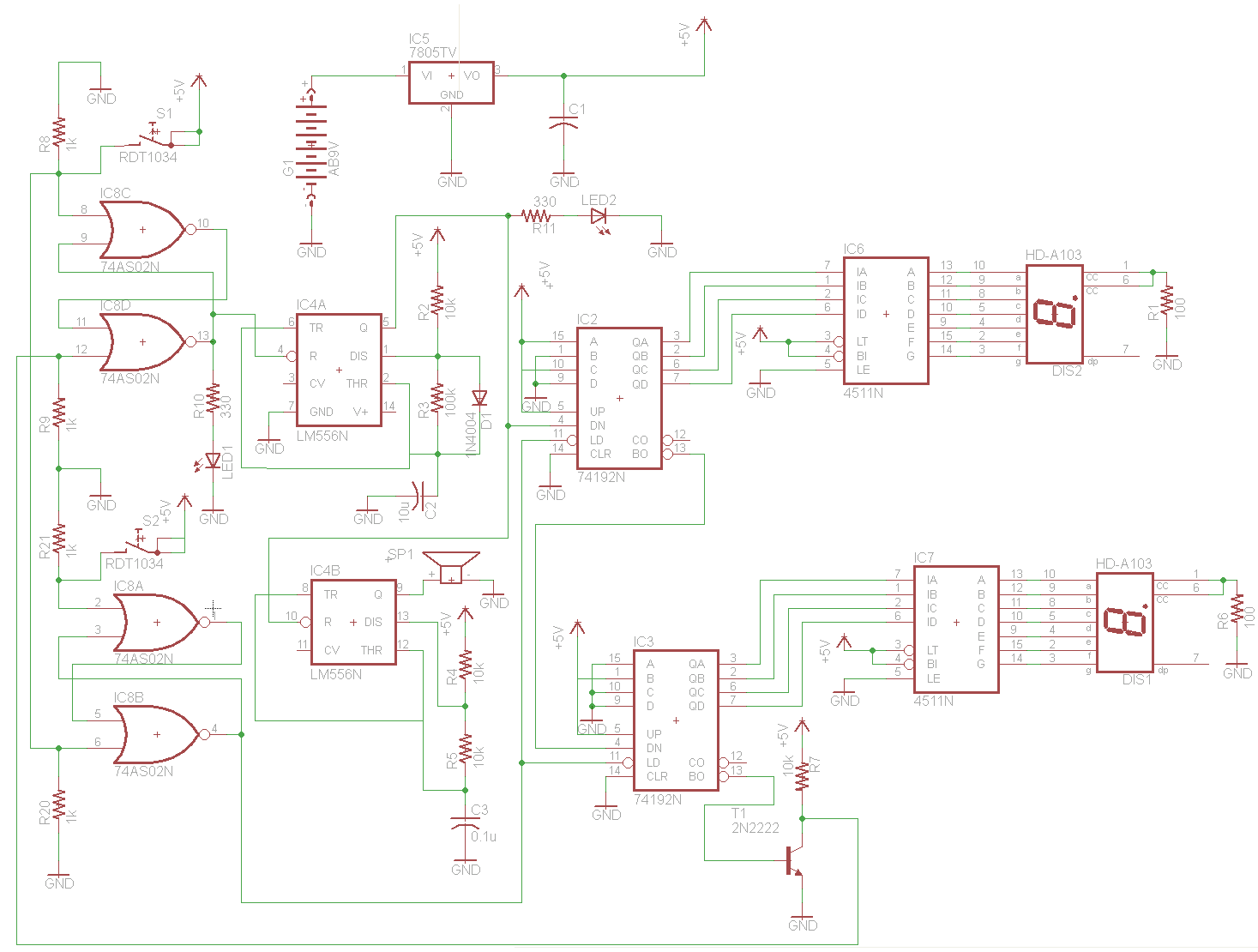
The output from the microcontroller is directed to a speaker or piezo buzzer, which provides an audible alert when motion is detected. The design ensures that the sound output is both timely and reliable, enhancing the effectiveness of the motion detection system. Overall, this project integrates key electronic components and principles to create a robust motion detection and alert system.this project use PIC18F25K20 microcontroller to detect if the sensor change state and it will emit a sound from the speaker or piezo, the MCU also detect the voltage of the battery in the startup, the algorithm it s very simple use an interrupt on change to detect the change on the PIR sensor. Power On - when circuit start, a delay come to MCU ge nerate a unknowed state, to avoid circuit malfunction, R6 and C1 make a RC delay filter, calculate delay with: 🔗 External reference
Related Circuits
The Proximity Sensor circuit is illustrated below. Three red boxes indicate the additions to the circuit previously constructed in Part 2: Motor Control. The new components included in the schematic are the GP2Y0A21YK IR Sensor, a headphone speaker, and...
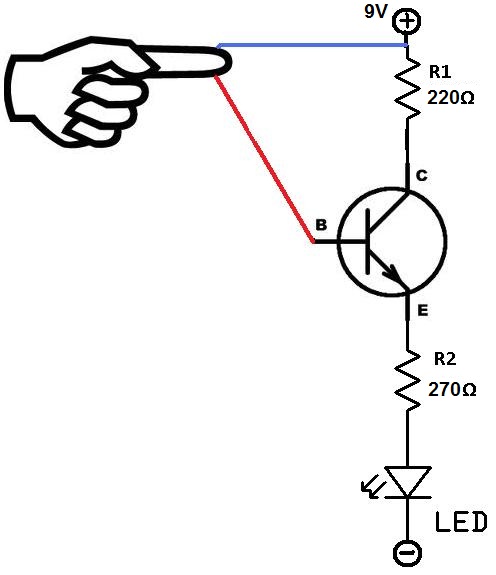
This project utilizes two wires, one red and one blue, which function as touch sensor wires. When a person touches both wires, the circuit closes, allowing current to flow and illuminate the LED. A 9-volt battery or an external...
Moderately priced Passive Infrared (PIR) sensor modules are now widely available. By using these readymade and pre-configured PIR sensors, even an average electronics enthusiast can implement motion detection systems effectively. Passive Infrared (PIR) sensors are devices that detect infrared radiation...
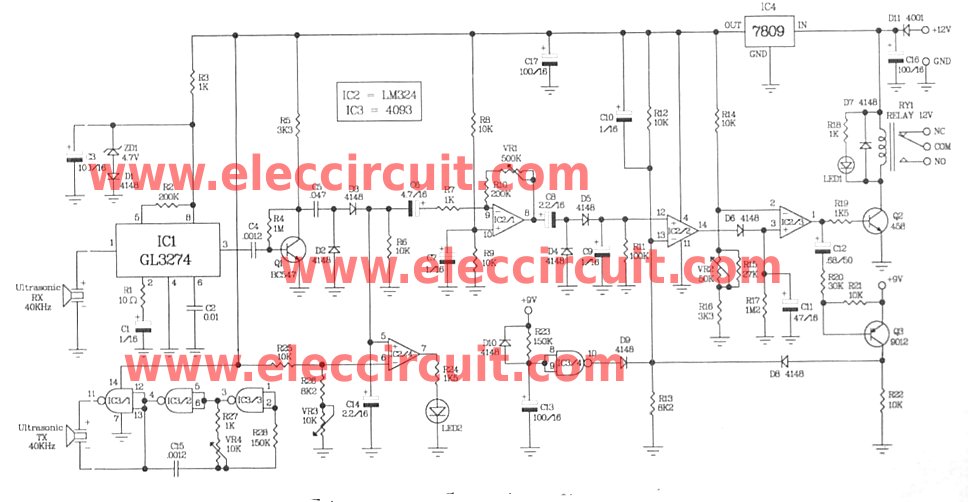
The motion sensor circuit depicted in Figure 1 operates when a 12-volt power supply is applied to the input point. The motion sensor circuit is designed to detect movement and trigger a response based on the presence of motion...
The project demonstration has been successfully completed, with the only remaining task being the final project report due on June 15, which will be integrated with a conference paper. This update marks the last entry in the electronic notebook,...
The robot requires a method for detecting obstacles (or other robots) without making physical contact. This capability allows the robot to determine whether to avoid or confront and investigate the obstacle based on its programming. This document outlines the...