
Pic Circuits

The biped walker project serves as an excellent introduction to robotics and microcontroller programming. The structure, made from 2mm plywood, allows for lightweight construction, which is crucial for the walker’s mobility. The two RC servos provide the necessary actuation for movement, enabling the walker to mimic bipedal locomotion.
The core of the system is the PIC16F84 microcontroller, which is notable for its ease of programming and versatility in various applications. It features flash memory, allowing for easy updates and modifications to the code without needing to replace the microcontroller. The programming interface for the PIC16F84 can be established using simple circuits that connect to a computer or a dedicated programmer.
The project also incorporates a bar graph display, which consists of multiple LEDs that can visually represent data, such as the status of the walker or other parameters. This feature enhances user interaction and provides immediate feedback on the system's performance.
In addition to the walker, the project encompasses a temperature recording system that integrates a thermistor for temperature sensing. The thermistor’s resistance changes with temperature, allowing the microcontroller to read and process temperature data. A serial EEPROM is included to store this data, enabling long-term monitoring and retrieval of temperature readings.
Overall, this project not only demonstrates the principles of robotics and microcontroller programming but also provides practical experience with sensor integration and data display techniques. The combination of hardware and software components offers a comprehensive learning platform for individuals interested in electronics and embedded systems.A small biped walker made of 2mm plywood. Powered by two RC servos. it is a popular microcontroller, easily available and programmable now as flash microcontroller 16F84. This simple circuit can be used to program the PIC16F84 and similar "flash memory" type parts. The bar graph - a series of LEDs in a line, such as you see on an audio display. In this project we are going to learn various things about this chip set and displaying text on this LCD This project uses a Microchip PIC microcontroller, a serial EEPROM and a thermistor to create a temperature recorder. 🔗 External reference
Related Circuits
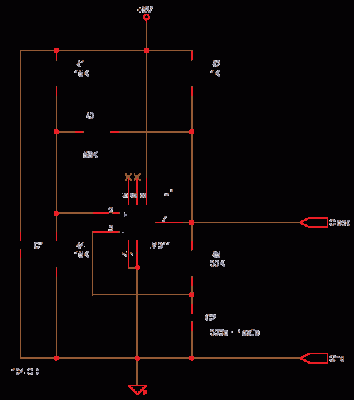
This circuit functions as a simple analog-to-digital interface with a resolution capability of 10 to 12 bits. A 10-bit resolution translates to 1024 counts or divisions of a full scale (FS), which is approximately equivalent to 3.5 digits or...
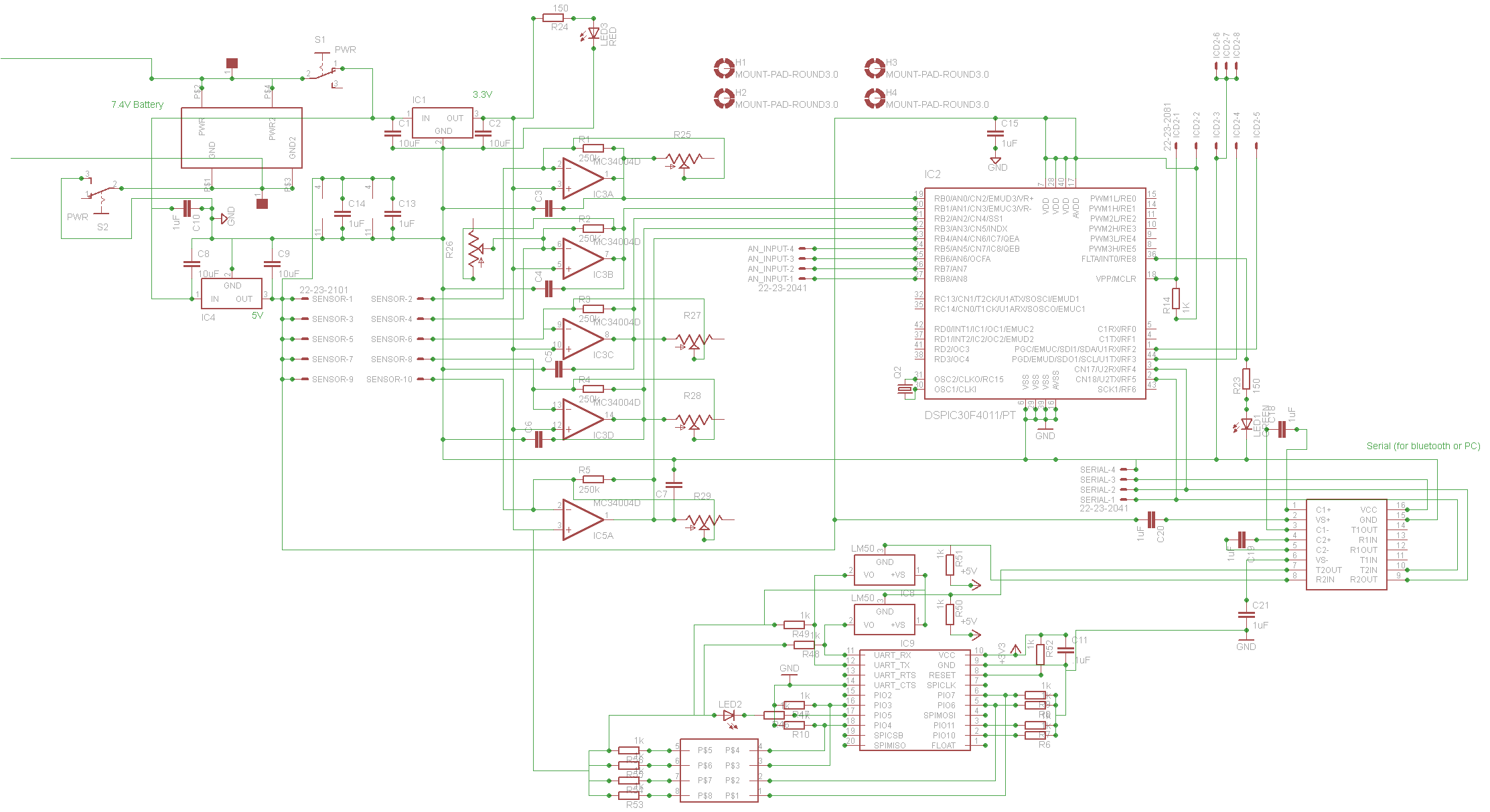
Connect a PIC microcontroller to an RN-41 Bluetooth module. The PCB was not designed by the current user, so the rationale behind the circuit's design, which differs from the voltage divider method used by others, is unclear. The 5V...
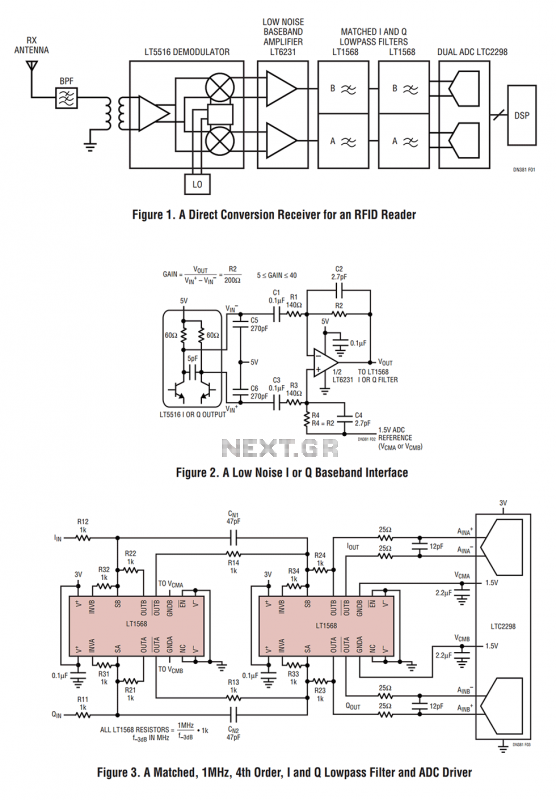
Figure 1 shows the block diagram of a direct conversion RF receiver—the receiver demodulates an RF carrier directly into a baseband signal without an intermediate frequency down-conversion (a zero IF receiver). The antenna, shared by both the transmitter and...
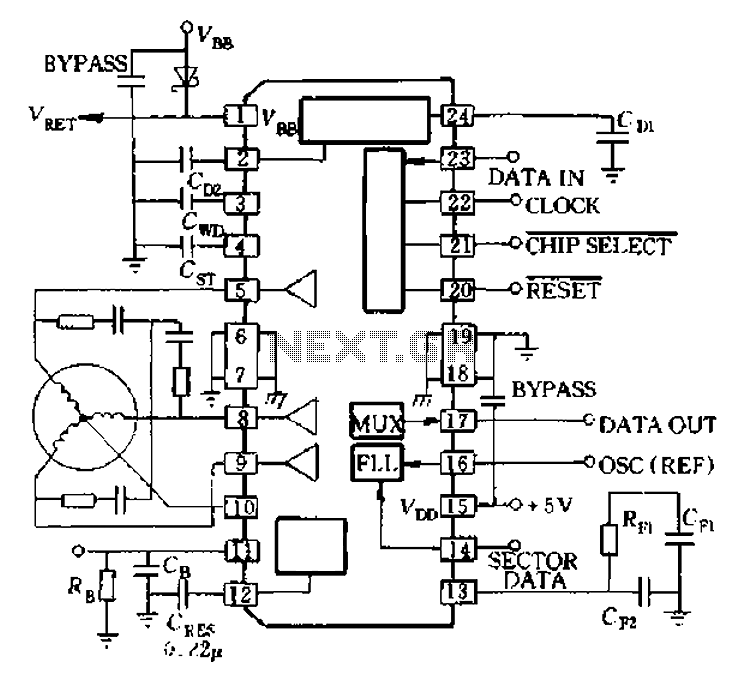
A8902 is a typical application wiring diagram. After a system failure signal from the delay island and CB 11 feeds into the motor brake, the system stops functioning until the RESET signal arrives, at which point the motor restarts. The...
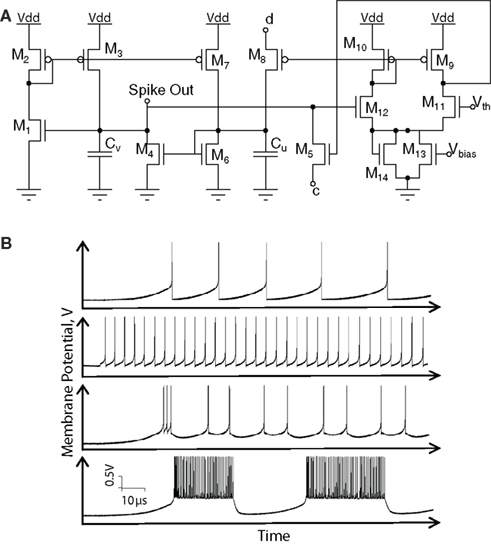
Hardware implementations of spiking neurons are highly beneficial for various applications, including high-speed modeling of large-scale neural systems, real-time operating systems, and bidirectional brain-machine interfaces. The specific circuit solutions for silicon neurons are dictated by the requirements of each...

There are several methods to input a signal into the NE602. Simple untuned approaches (a and b) are viable. For tuning to a specific frequency, an LC resonant circuit with ungrounded trimmer capacitors (c and d) or grounded variable...