
the water level control system design of the one-chip computer

The proposed water level control system integrates modern technology to enhance operational efficiency and accuracy in water management. The use of a microcontroller, specifically the AT89S52, allows for sophisticated control algorithms to be implemented, which can adapt to varying conditions and provide real-time feedback. The system's architecture includes a water level detection circuit that continuously monitors the water level and communicates with the microcontroller. The stepper motor, driven by the L298N motor driver, enables precise control of the probe's position, ensuring accurate water level readings.
The use of sensors to detect water levels provides a significant improvement over traditional methods. The microcontroller processes the signals from the sensors and adjusts the motor's operation accordingly, allowing for responsive control of the water supply. This system can be programmed to maintain specific water levels, reducing waste and improving resource management. The display unit provides a user-friendly interface for monitoring and adjusting settings, enhancing user interaction with the system.
Overall, this water level control system represents a significant advancement in automation for both industrial and domestic applications, addressing the challenges of traditional methods while improving efficiency, accuracy, and reliability in water resource management. The integration of modern microcontroller technology and stepper motor control paves the way for future developments in automated water management systems.In the production field, realize the automatic detection of the water level and control a critical technology that is the industrial process control, have important meanings in the automation level which improves industrial process control. In life field, supplied water the way was generally through realizing control manually in the pasted, apt to contribute to the losses that to water
resource, so people pay more and more attention to the question of the water resource now. At present, the water level control system is a water supply system employed extensively, there can be many kinds of implement methods in water level control, such as mechanical control, logic circuit control, electromechanical control, sensor are controlled etc. , but control accuracy exists low in the traditional control mode, energy consumption is great, can`t realize continuous control and characteristic of tracing water level, so a thesis designs the more convenient more accurate water level control system.
Mainly by the intersection of one-chip computer and minimum the intersection of system and circuit, the intersection of water level and detection circuit, the intersection of stepping motor and driving circuit, the intersection of water level and display circuit, the intersection of water pump and driving circuit, software design, etc. system this. Design the system block diagram to be shown as in Fig. 1. The intersection of one-chip computer and control module in the 1 Fig. , for key part of system, keyboard and display unit used for, realize the intersection of human-computer interaction and function, parameter and state that among them will need setting up through the keyboard are input into the one-chip computer, and reveal on the display unit through the control device, when dropping in water level in the water tank, move the probe with dropping, pass the simple algorithm, the water level in the display unit real-time display water tank again too.
The control device of the one-chip computer is used mainly for producing the control impulse of the stepping motor, the step number is gathered and dealt with at present to the stepping motor, and then pass the simple algorithm, reveal the present water level on the terminal station LCD. The choice to the control device adopts AT89S52 as the scheme of system control. AT89S52 one-chip computer arithmetic operation function is strong, the degree of freedom flexible in programming of the software is large, can be realized by programming of software various algorithms and logic control.
As to FPGA, its chip pins are few, in very easy realization of the hardware. And it also has low power dissipation, volume it is small, and cost low grade advantage that technology is ripe. The main purpose to design this time is the rotational speed of the control electric machine, its electrical machinery adopts the four-wire stepping motor of quarter-phase, so the electrical machinery driver module is essential, its scheme determines to adopt the dedicated motor drive chip L298N, the circuit design of chip of this motor drive is simple, antijamming capability is strong, reliability is good.
Their schematic circuit diagrams are shown as in Fig. 2. The traditional water level measures and adopts the pressure capsule, change through AD again, convey to the one-chip computer, operation is complicated, the precision is not high enough, or it is contact-type to adopt and pick up signals, change of the water level of perception of installing several metal bars of different positions in the water tank, utilize the metal and aqueous conductivity collection water level signal directly, operation is simple, but can`t realize the control of the serial water level. Design utilizing the mechanically controlled stepping motor of the one piece this time, hang one to move the probe on the stepping motor, the probe touches water, then the one-chip computer gathers to the si
🔗 External reference
Related Circuits

This section outlines the various systems on board the Chinook II. The approach taken is to utilize reliable and appropriate systems that align with the boat's size and intended use. The design incorporates elements that may deviate from standard...
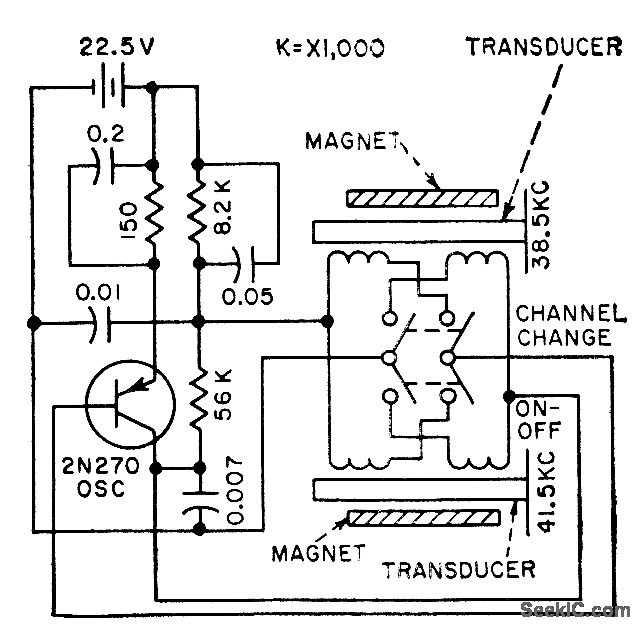
The frequency of a transistor oscillator is regulated by two different lengths of nickel tubing, each containing two coil windings. One coil functions as a driver, while the other serves as a pickup to generate feedback voltage necessary for...
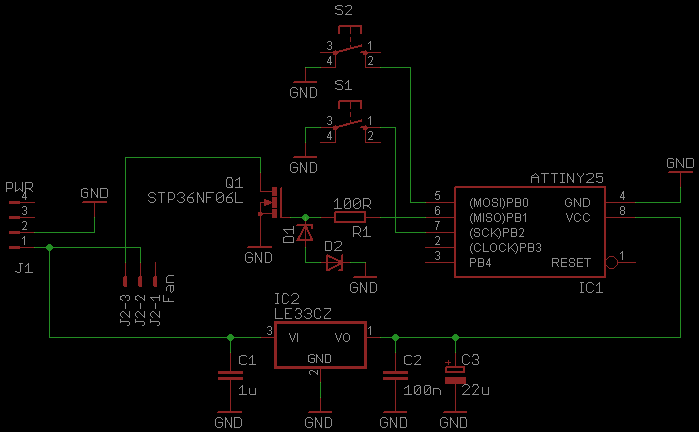
This document serves as a continuation of the previous work on PWM controllers utilizing 555 timers. The new design incorporates microcontrollers and MOSFETs in place of the 555 integrated circuits and transistors. Two versions have been developed: one equipped...
Circuit to control RC servos using 0-10V control voltage This circuit is designed to control RC servos by utilizing a control voltage range of 0 to 10 volts. The operation of the circuit is based on the principle of converting...
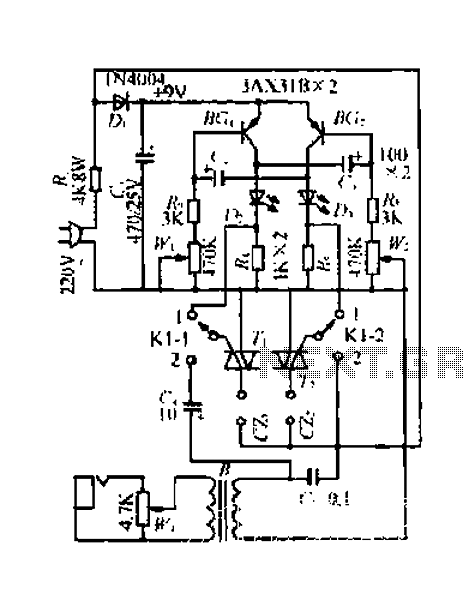
A 220V mains power supply is reduced using a control circuit designed by N. Guanidine D. Yi. The circuit features a spike Bode and provides a +9V voltage supply. It includes components such as a control port (G), a...
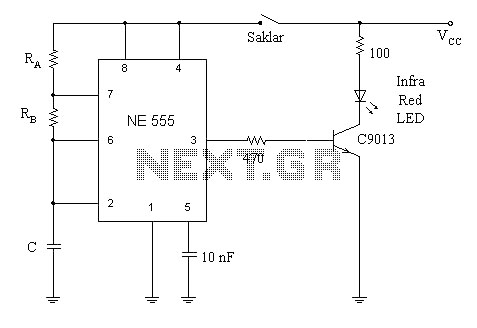
A simple circuit diagram illustrates a schematic for a remote control system, which consists of two components: a transmitter and a receiver. The transmitter circuit is controlled by the NE555 integrated circuit (IC). This system operates by detecting the...