
Transform electromyographic signals into music

The integration of bio-electrical signals into human-computer interfaces represents a significant advancement in assistive technology, particularly for individuals with mobility impairments. The applications of surface electromyography (sEMG) extend beyond basic control mechanisms; they encompass sophisticated feedback systems that enhance user interaction with devices. The ability to translate muscle signals into actionable commands opens new avenues for rehabilitation and therapeutic practices, particularly in pediatric and cognitive rehabilitation settings.
The architecture of such systems typically involves sensor arrays that capture bio-electrical signals from specific muscle groups. These sensors are often paired with signal processing units that filter and amplify the collected data, translating raw bio-signals into usable input for various applications. For example, in prosthetics, myoelectric signals from muscles such as the flexor digitorum superficialis and flexor carpi ulnaris can be processed to enable precise control of prosthetic limbs, allowing users to perform intricate tasks.
Moreover, the implementation of auditory feedback systems, as seen in historical studies, enhances the user experience by providing real-time auditory cues related to muscle contraction intensity. This integration of sensory feedback not only aids in rehabilitation but also promotes a more intuitive interaction with technology, reducing reliance on visual displays.
The evolution of these technologies has led to innovative applications, such as the BioCar, which demonstrates the potential of bio-cybernetic control in everyday mobility solutions. The adaptability of these systems to various control scenarios, from simple toys to complex robotic arms, showcases their versatility and the ongoing need for research and development in this field.
In conclusion, while the journey towards fully integrating bio-electrical signals into everyday technology is ongoing, the strides made thus far highlight the transformative potential of these systems in improving quality of life and enhancing user interaction with technology. The challenges that remain will require continued innovation and interdisciplinary collaboration to unlock the full capabilities of bio-electrical interfaces.Developers of human-computer interface technologies have recently been focusing on the use of bio-electrical signals (eye movement, electrical activity of muscles and brain) as inputs to control devices in order to increase the capacity of signal processing of the central nervous system (enhanced perception and control). The design of human-comput er interfaces is intended to adapt the existing technology to human physiology with devices that are sensitive, interactive and easy to use. Improving the quality of life through the use of medicine, education, recreation and communication is a social priority; in particular the use of games or music in rehabilitation may provide a better approach when working with children or patients with reduced cognitive abilities.
Surface electromyography (sEMG) consists of measuring the electrical activity of muscles during their contraction (Merletti et al. , 2010). The control of prostheses with myoelectric signals is a current practice (Parker and Scott 1986). Some of the prostheses controlled by myoelectric signals that are available today on the market were developed in collaboration with different universities (MIT, Boston, Utah, New Brunswick, Michigan).
However, the EMG signals have in most cases been used as a switching control. For example, in 1994 Dave Warner and colleagues described the development of music devices controlled by the muscles using the timing of muscle activation as a control to turn a device on or off. In a study published thirty years ago (Asato et al. , 1981), auditory feedback (sounds modulated in frequency by EMG) was successfully used in the neuromuscular re-education of mentally retarded patients.
This use of muscle sounds in rehabilitation is interesting since it allows the patient to have an immediate idea about the intensity of the muscle contraction even on muscles where it is not possible to have a force feedback, and allows a more natural approach compared to displaying parameters on a PC monitor or on an oscilloscope. More recently, a music interface based on biometric signals (accelerometers and joint goniometers) was used to synthesize simple modulated sounds from the position of the upper limbs (Knapp and Lusted 1990; Tanaka 2000).
The interface was later improved by introducing the combined use of EMG and accelerometer signals (Tanaka and Knapp 2002; Dubost and Tanaka 2002). In the mid-1990s, the Human Performance Institute of the California-based Loma Linda University Medical Center developed a telerobotic device, a radio-controlled car called the BioCar with direct bio-cybernetic control (Warner et al.
, 1994). Thanks to a software based on the identification of muscle activation with simple on/off controls from three muscles, a man paralyzed in an auto accident was able to navigate the BioCar through a very complicated course using the muscles of his face and arms. The same system that allowed him to control this toy car could be easily adapted to control his wheelchair or some type of robotic arm.
Thus, the BioCar is a demonstration of how biosignals can be used to control real objects through computers. The EMG signals from the flexor digitorum superficialis (FDS) and flexor carpi ulnaris (FCU) muscles have been used recently as a form of real-time control for manipulating simple geometric objects in a virtual model of the joints of the fingers and wrist (Reddy and Gupta 2007).
However, despite these many experiments and developments, the use of EMG signals for controlling objects in virtual reality or in a real environment still remains a challenge. One of the first attempts to create futuristic music using the analysis of ck Miranda and colleagues published a study in which electroencephalographic signals were used for the first time for the generation of sounds.
Although the research in EMG has been rapidly ion. 🔗 External reference
Related Circuits
The 555 is wired as an astable and the capacitor is charged only through the 4.7Kohm trimmer (notice the diode) and discharged only through the 2.2 Kohm trimmer, making the duty cycle fully adjustable. The square wave is then...
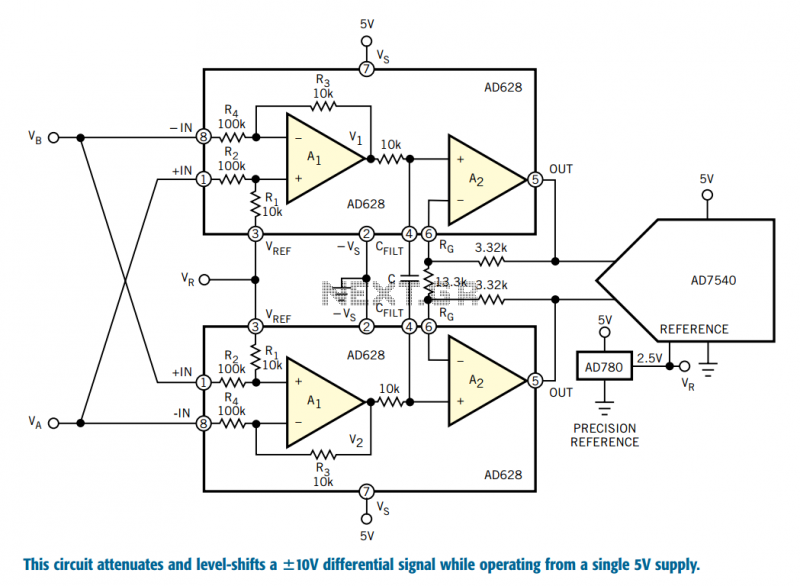
Designers who build equipment for the industrial market share a widespread problem. At one extreme, they must build equipment that supports ±10V bipolar voltages, often riding on a high common-mode level, a requirement enforced by 30 years of legacy...
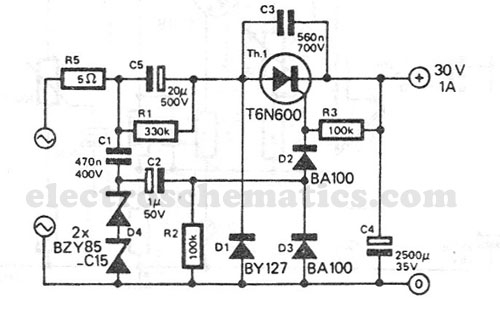
This transformerless power supply circuit is designed for medium current applications. During the negative half period, the capacitor C5 is charged to the peak voltage of the network. The positive half wave will trigger the thyristor, allowing the electric...
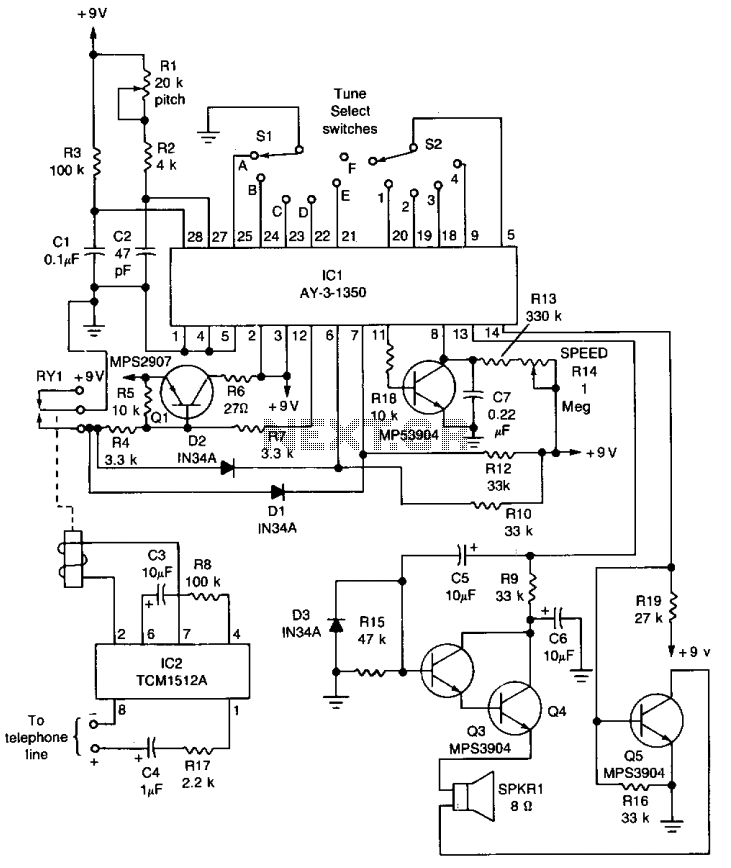
The core component of the circuit is IC1, the AY-3-1350 melody synthesizer IC from General Instrument. IC2 is a TCM1512 telephone ring detector IC powered by the telephone line. The circuit operates when IC2 detects a ring pulse on...

An AC contactor DC transformer circuit operates as a voltage regulator for AC applications. DC contactors come in various types. AC contactors are electromechanical devices used to control the flow of electrical power in AC circuits. They function by opening...
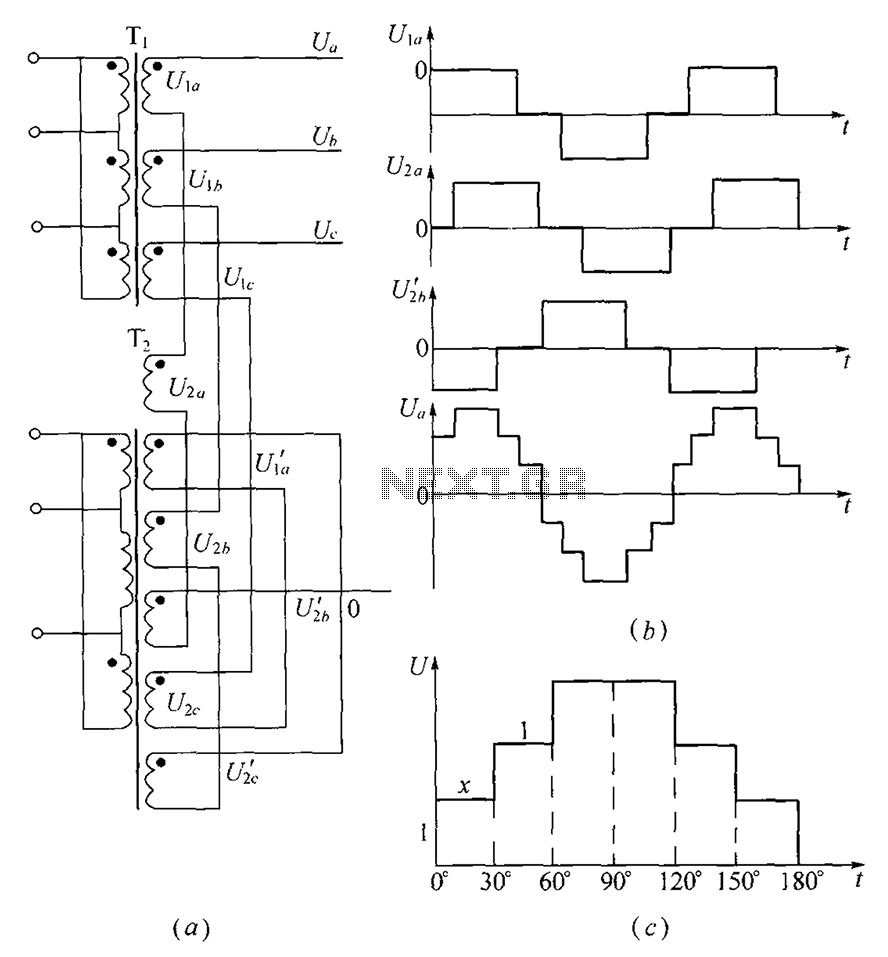
As shown, (a) for the three-phase step wave inverter output transformer winding connections; (b) in the figure, its output waveform. The three-phase step wave inverter is designed to convert direct current (DC) into a three-phase alternating current (AC) output. This...