
ultrasonic transmitter

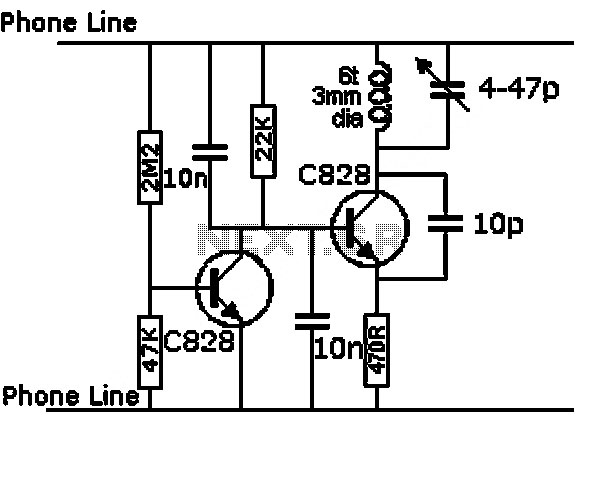
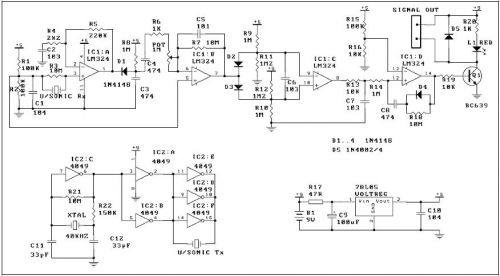
The Ultrasonic Proximity Transmitter is designed to emit ultrasonic waves that can be detected by an ultrasonic receiver. This basic circuit typically consists of a few key components: an ultrasonic transducer, a microcontroller or oscillator circuit, and necessary passive components such as resistors and capacitors. The transducer converts electrical signals into ultrasonic sound waves, which propagate through the air.
The schematic representation of the circuit will include the ultrasonic transducer connected to a microcontroller. The microcontroller generates a square wave signal, which is fed to the transducer. This signal determines the frequency of the emitted ultrasonic waves, commonly around 40 kHz for proximity sensing applications.
In addition to the transducer and microcontroller, the circuit may incorporate a power supply section to ensure stable operation. This can be achieved using a battery or a regulated power supply. Decoupling capacitors are often included to filter out noise and provide a stable voltage to the microcontroller.
The construction process involves carefully assembling the components on a breadboard or PCB, following the schematic. The tutorial provides detailed images to guide through each step of the assembly, ensuring that connections are made correctly and securely.
Once the assembly is complete, the device can be tested by measuring the distance to an object using the time it takes for the emitted ultrasonic waves to reflect back to the transducer. This functionality allows the ultrasonic proximity transmitter to be integrated into robotic systems, enabling them to navigate and avoid obstacles effectively.
Overall, this project not only demonstrates the principles of ultrasonic sensing but also provides a practical application in robotics, enhancing the capabilities of autonomous systems.This section gives step-by-step instructions along with photos to the construction of Ultrasonic Proximity Transmitter. Because this is a very simple circuit, only a schematic for the sensor is shown here: (For the PDF format click here.
) This tutorial`s objective was to help others built a ultrasonic proximity transmitter which combined with a ul trasonic receiver will be used as the eyes of a robot. Complete construction details and photos are included in this tutorial for the sensor. Once the concepts are conveyed the reader should be able to build their own sensor. 🔗 External reference
Related Circuits
Each step will result in a self-functional unit. By the end of this process, it will be possible to link the steps together into a powerful FM transmitter. This section will explain the main controlling unit for the FM...
This is the design circuit diagram of an ultrasonic mosquito repeller. The circuit operates based on the theory that insects, such as mosquitoes, can be repelled by sound frequencies in the ultrasonic range (above 20 kHz). The circuit utilizes...
A DSB transmitter is significantly less expensive to construct compared to an SSB transmitter since it does not require filters or phasing networks. This circuit can generate an output of up to 1 watt on the 10-meter band. The...
This transmitter utilizes a 5089 DTMF generator chip along with a keypad to produce DTMF signals, which are then modulated onto an infrared (IR) light beam emitted from an IR LED. The circuit employs a 3.579-MHz TV burst crystal...
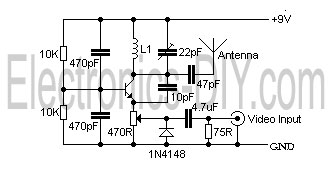
This is a simple video transmitter capable of transmitting signals up to 50 meters. It can be connected to a camera or other video sources, allowing viewing on a VHF channel analog TV. The transmitter operates on a supply...
Currently working on an insect robot project. This is the first robotics project. The focus is on two methods of detecting obstacles, namely infrared (IR) and ultrasound. A decision has not yet been made regarding which method is more...