
74HC240 produces and seeks all robot
The 74HC240 integrated circuit plays a pivotal role in the design of robotic systems, particularly in applications where signal integrity and response time are critical. As a three-state buffer, it provides the ability to manage multiple input signals effectively, allowing for seamless communication between various components of the robotic system. The inclusion of the Schmitt trigger functionality within the 74HC240 ensures that the circuit can handle noisy signals without producing erroneous outputs, making it ideal for environments where electrical interference may be present.
In practical applications, the Schmitt trigger's hysteresis effect is particularly beneficial in reducing false triggering caused by small fluctuations in input signals. This characteristic is essential in robotic systems where precise control is needed for tasks such as navigation and manipulation. The use of light-sensitive diodes as part of the input mechanism allows the robot to respond dynamically to changes in its environment, enhancing its ability to interact with various stimuli.
Furthermore, the buffering capabilities of the 74HC240 enable the robotic system to maintain data integrity during high-speed operations, ensuring that commands from the central processing unit (CPU) are accurately relayed to peripheral devices. This synchronization is crucial for the effective execution of complex tasks, as it allows the robot to operate smoothly without lag or data loss.
Overall, the combination of the Schmitt trigger's unique characteristics and the robust functionality of the 74HC240 integrated circuit provides a solid foundation for developing advanced robotic systems. These systems can achieve a high degree of reliability and efficiency, paving the way for future innovations in robotics and automation technology.This text give reader it introduces another that Is produces to be central to seek the smooth robot as top management by 74HC240, still carry out low technology, low-cost making idea, enjoy together with everybody. The threshold voltage of the Schmitt trigger has determined the set value of the system, the characteristic of the Schmitt trigger has
just determined the characteristic of this system. So it is necessary to know the characteristic of this device thoroughly. The Schmitt trigger was invented in 1934 by the American scientist Otto Herbert Schmitt, he was only a graduate student at that time. In thing the next three years, he describes as this invention Thermionic Trigger in its thesis for the Doctorate.
This invention is the direct achievement that he carries on research to the neural pulse propagation in squid`s nerve. In electronics, the Schmitt trigger includes the regenerative comparator circuitry. The Schmitt trigger has two stable conditions too, but the one different from general flip-flop is, the Schmitt trigger adopts the electric potential to touch off the way, its state is kept by the electric potential of the input signal; As to the negative-going input signal of decreasing progressively and which increase progressively two kinds of different change directions forward, the Schmitt trigger has different threshold voltage.
The Schmitt trigger is a kind of special gate network, different from ordinary gate network, the Schmitt trigger has two pieces of threshold voltage, are called positively threshold voltage and negative-going threshold voltage separately. Make the input voltage that the circuit state changes called the positively threshold voltage while the input signal rises to the high level from the low level, make the input voltage that the circuit state changes called the negative-going threshold voltage while the input signal drops from high level to the low level.
The forward direction threshold voltage difference of and negative-going threshold voltage is called the voltage of return difference. As to the standard Schmitt trigger, as the input voltage is higher than the positively threshold voltage, export it for being high; As the input voltage is lower than the negative-going threshold voltage, export it for being low; Act as and input it among exactly negative-going threshold voltage, not exporting the change, that is to say the output is turned over from the high level and transferred to low level, it is different or is turned over from the low level and transferred to the correspondent threshold voltage of high level.
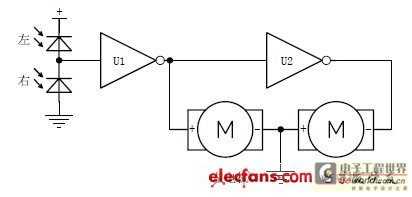
Only when the input voltage changes enoughly, export will change. This kind of threshold movement is known as the sluggish phenomenon, indicate there is memory nature in the Schmitt trigger, anti-interference that can be used for in the open loop is disposed. Fig. 2 improves seeking all robot of edition, the key part is formed by a pair of light sensitive diodes and 74HC240 integrated circuits.
74HC240 is a slice of powerful three-state buffer, integrate No. 8 within the chip and have Schmitt trigger that import the characteristic reverse dashpot. In the digital calculator, the function of this kind of dashpot is the data used for preserving the processor to send to the peripheral hardware temporarily, there are numerical control dashpots, can make CPU part and peripheral hardware of the slow speed work of the high speed operation play a coordinating and buffering role, realize the synchronism of data transmission. Seeking all robot of this improvement edition, because of have joining of 74HC240, make control system of robot and can succession get all advantages of Schmitt trigger hereinbefore introduce, can rely on the function of the dashpot, to coordinate the cooperation between robot electronic part and machine construction.
Complete the robot run mode for the future actually, is between analog control and di 🔗 External reference
Related Circuits
The circuits on this page are basic designs for "Diode Matrix" switch machine control systems that can be used to operate "Stall Motor" switch machines in ladder-type storage yards or other multiple turnout areas. The principle for these diode...
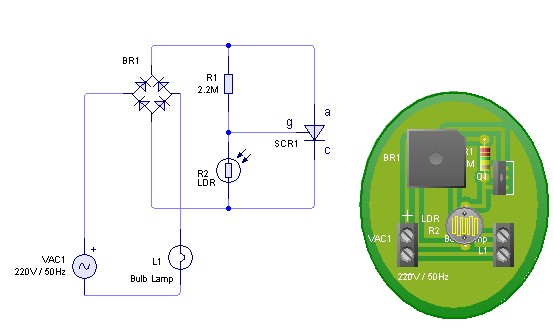
Adjust the value of R1 to achieve optimal performance of the LDR sensor. If, in practice, a resistance of 2.2 MΩ still activates the lamp, it is possible to increase the value of R1 to a larger resistance of...
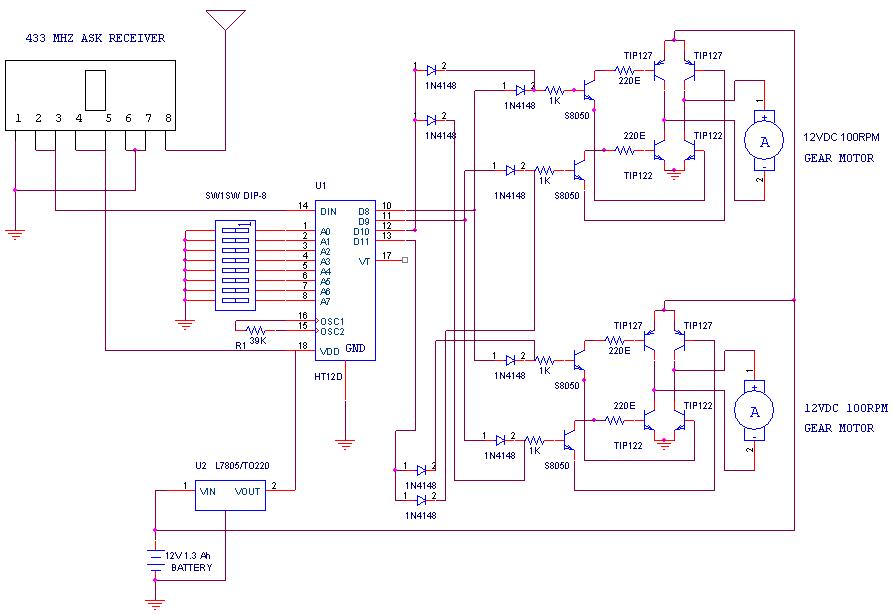
A remote-operated spy robot circuit can be controlled using a wireless remote controller. It captures audio and video information from the surroundings and transmits this data to a remote station via RF signals, with a maximum range of 125...
An SCR (Silicon Controlled Rectifier) functions similarly to a diode, allowing current to flow in one direction and can be turned on; it remains in this state until the power is interrupted. The query arises regarding its application in...
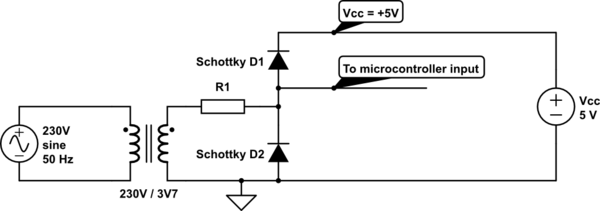
Provide zero crossing detection for the controller. Using the schematic below, a square wave signal was generated, representing the positive and negative half-periods. The issue is that the resistor needs to be quite large, which can lead to excessive...
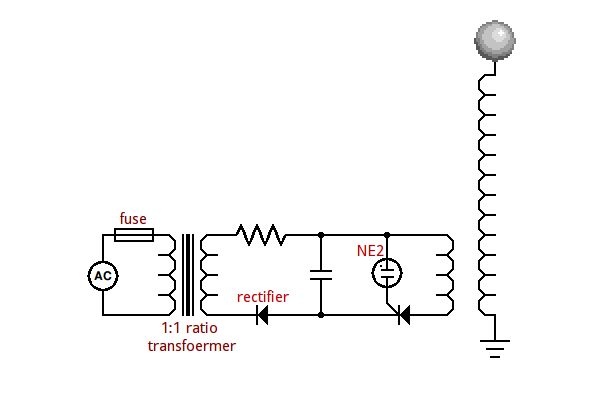
The use of electrically excited gas discharges significantly predates the invention of the incandescent lamp. Physics laboratories, both historical and contemporary, utilize various gas-filled tubes for multiple applications, including light generation for spectroscopy, materials analysis, gas dynamics studies, and...