
agriculture based robot e project
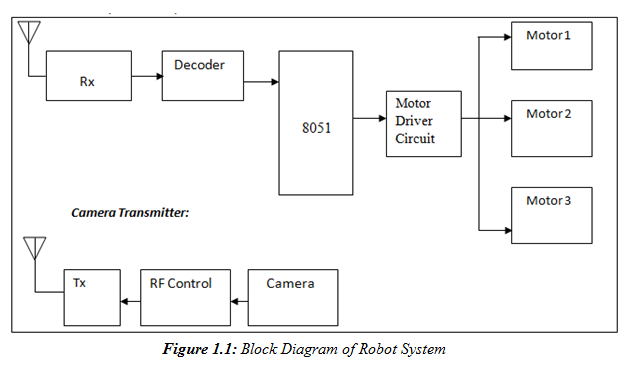
The camera transmitter includes a camera, an RF controller, a transmitter, and a transmitting antenna. The camera captures images, which are converted into RF signals for transmission. This unit also manages the spraying actions and other functionalities of the robot.
Step 1: The robot allows farmers to control it remotely from their homes, enabling them to view their fields through the camera, which provides clear images and sound.
Step 2: The robot can spray pesticides or water over extensive areas of the field using a submersible pump for efficient distribution.
Step 3: The robot's movements—right, left, forward, and reverse—are controlled via the transmitter and receiver, with actions initiated by pressing the keypad. This capability allows users to maneuver the robot in challenging areas with ease.
The agriculture-based robot is designed to enhance efficiency in farming practices by automating tasks traditionally performed by human laborers. The integration of the P89V51RD2 microcontroller serves as the central processing unit, coordinating various components of the system. The RS-232 port facilitates communication between the robot and external devices, while the keypad allows for user input to control the robot's movement and functions.
The wireless camera system offers real-time monitoring of the fields, transmitting video signals to the user’s display unit. This feature is crucial for assessing crop health and monitoring irrigation needs without the necessity of physical presence in the fields.
The motor driver circuit is an essential component that translates the microcontroller's commands into physical movement, enabling the robot to navigate complex terrains. The use of a submersible pump for pesticide and water spraying ensures that the robot can efficiently cover large areas, improving the overall productivity of the farming operations.
In summary, the agriculture-based robot represents a significant advancement in agricultural technology, providing a solution to labor shortages and enhancing the efficiency of farming practices through automation and remote control capabilities.A prototype model of Agriculture Based Robot . Till recently the farmers were using age-old instruments in cultivating their lands. They themselves were putting the manuallabor. Hence there was thelabor problem. Farmer`s facing this type oflaborshortage. Because, now the youngsters are attracted by the city life & jobs in the towns. The farmer`s struggled from thislaborerproblem. figure 1. 1 and figure 1. 2 shows the implementation block diagram of The Agriculture Based Robot . The block diagram consists of Microcontroller Unit ( P89V51RD2), IC, RS-232 port, Key-pad, TV, Wireless Camera, Motors &driver circuit, etc. It is nothing but a receiver. This unit consists of receiving antenna, receiver, decoder, 8051microcontroller IC, motor driver circuit & motors.
Here the signal is received from the antenna and goes to receiver. Then we can decode signal with the use of decoder. All motors are controlled by the motor driver circuit & with the help of 8051microcontroller. Camera Transmitter: It consists of camera, RF controller, transmitter, & transmitting antenna. Here the camera capture or view the images. That can be converted into RF signal and transmitted through an antenna. It is our actual transmitter. It consists of controlling switches, Encoder, and Transmitter. Here the spraying action and all other actions are controlled by this unit. STEP1:- Our robot helps to farmers in such a way that, control it by sitting at home. We can construct/adopt the camera circuits for this application. The robot gives the clear picture as well as noiseless sound. So we can see your fields sitting at home. STEP2:- With the help of robot, we can spray pesticides or water to the field. And the robot covers more distance of the fields. We can use submersible pump for spray pesticides to more distances. STEP3:- The moving right, left, forward, reverse, all type of action are controlled with the help of the transmitter and receiver. All these action take place when the user pressing the keypad. So the user can move robot in critical areas & also it can be easily controlled. 🔗 External reference
Related Circuits
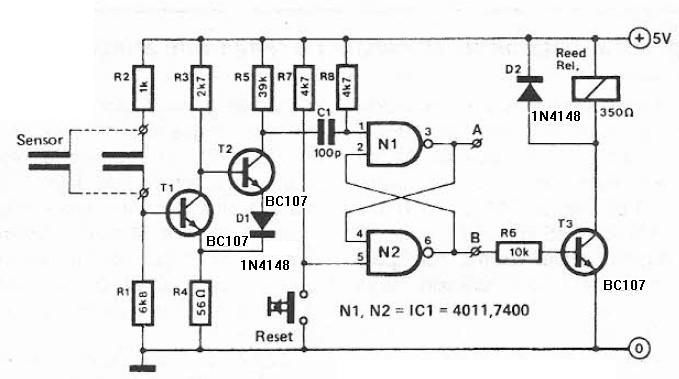
This humidity detector circuit diagram is straightforward and utilizes a limited number of components. It can be employed to activate electronic devices when the detector identifies a specific humidity level. The sensor is made from two copper pieces positioned...
Model railroad turnouts, often referred to as switches, can be controlled in various ways. The simplest method is manual control, operated by hand. Remote activation is typically achieved through pneumatic (air) or electrical means. The project discussed in these...
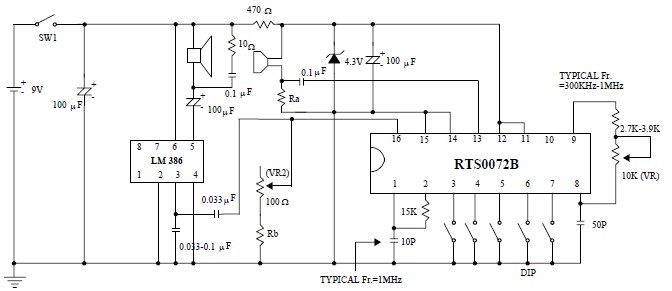
This voice changer circuit diagram is an electronic project developed using the RTS0072B single-chip CMOS LSI, specifically designed for voice-changing applications. It can transpose or distort one voice into another by encoding the input audio signals at normal speed...
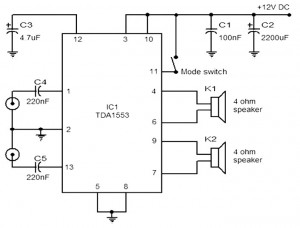
The provided schematic represents a car stereo amplifier circuit that can be utilized in cars or other vehicles. The circuit is based on the TDA1553, which is a Class-B audio amplifier. This circuit is straightforward, consisting solely of the...
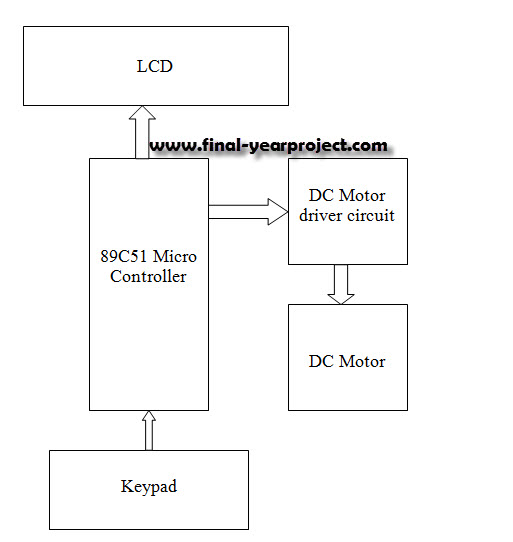
This report details an electronic project focused on the speed control of a DC motor using a microcontroller and PWM (Pulse Width Modulation). The system integrates a microcontroller with an LCD, keypad, and a DC motor driver. The microcontroller...
Phone In Use Indicator Electronics Project using 5 resistors, 2 NPN transistors, 4 diodes, and 2 light-emitting diodes. The Phone In Use Indicator is an electronic project designed to visually indicate when a telephone line is active. This circuit employs...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713