
Arduino project
The proposed vibrotactile haptic feedback device is designed with several key components to facilitate its functionality and usability in educational environments. The device will incorporate a microcontroller that manages the vibration motors and wireless communication protocols, ensuring efficient operation and responsiveness to user input. The choice of battery type will be critical, with a focus on rechargeable lithium-ion batteries to provide a balance between weight, size, and battery life.
The spherical shape of the device will be manufactured using lightweight materials, such as ABS plastic or silicone, which will also enhance user comfort. The finger indentations will be ergonomically designed to accommodate various hand sizes, promoting ease of use for a wider audience. Each indentation will house a small vibration motor capable of generating varying frequencies and intensities of vibration to convey different types of haptic feedback.
Wireless communication will be established using Bluetooth or Wi-Fi modules, allowing seamless interaction with educational software running on external computers or tablets. This interaction will enable educators to customize haptic feedback experiences based on the curriculum and specific learning objectives, enhancing engagement and understanding of complex concepts.
The software interface will be developed to allow teachers to create and modify haptic feedback scenarios easily. It will include pre-defined templates for scientific and mathematical applications, as well as tools for educators to design their own haptic experiences. This adaptability will ensure that the device can be used across various subjects and educational levels.
In summary, the development of an affordable, versatile vibrotactile haptic feedback device aims to bridge the gap in educational haptic technology. By combining user-centered design, efficient wireless communication, and a robust software platform, this device has the potential to enhance learning experiences across multiple disciplines, making haptic technology accessible to a broader range of educational institutions.Many educational haptic feedback devices use kinesthetic force feedback devices such as the Novint Falcon and the Phantom Omni. Although these devices are relatively cheap compared to other high end haptic feedback devices, they are still expensive for educational purposes.
Our team has therefore decided to develop an affordable vibrotactile hapti c device that can be used as an education tool for augmenting teaching of various disciplines through the use of haptics. The device must be generic enough such that it can be used in many different educational situations. Our team`s intention to use vibrotactile feedback is motivated by the fact that vibrotactile feedback devices had been used in real-world applications such as medical catheter teleoperator, gaming controller, and mobile phones with considerable success.
In addition, vibrotactile feedback devices are generally less complex and cheaper compared to kinesthetic feedback devices, which makes it suitable for use in the education field. Many haptics applications have been designed for teaching scientific concepts in the educational field.
For example, [1] and [2] use the Phantom Omni haptic device together with detailed molecular simulation in order to convey chemical bonding information to the user. Similarly, [3] has used the Novint Falcon to allow user to the feel the molecules and their atomic interaction forces.
[4] has used haptics to teach mathematical functions to people with vision disabilities, by allowing them to feel the curve and shape of the mathematical functions. Many of the above educational haptics applications rely on commercial products such as the Novint Falcon and the Phantom Omni, Though this product are cheap compared to other high end haptic devices, they still cost from $300 for the Novint Falcon and $1000 for the Phantom Omni.
Given that schools typically requires tens or more haptic devices, such high cost will prevent them from investing in using haptics as a tool for their education work. Vibrotactile haptic feedback devices has been used in many industries with varying degrees of success.
Vibration feedback has long been used in pagers and cell phones to inform user of impending phone calls, messages, or emails. In the gaming sector, vibration feedback has been used to add realism to the gaming experience [5], in which gamers feel vibrations whenever they are being attacked or when they bumped into a wall.
Recently, vibration feedback had been used in medical catheter teleoperation systems to convey obstacle information to the surgeon. Given such rich uses of vibrotactile feedback in many other fields, it is a wonder why vibrotactile haptic feedback devices has not been more pervasive in the education field.
Our literature study informs us that there are very few devices that uses vibration feedback for use in education or teaching. This therefore motivates us to come up with a cheap yet generic vibrotactile feedback device for use in educational settings.
For our overall design, our team has decided to come up with a vibration feedback device that is self contained, i. e. , no external power input or wiring cable needs to be attached to the device. This is to allow complete freedom of motion when using our device. In order to realize this objective, the device will be battery powered, and that wireless communication will be used to communicate between the device and an external computer.
Our team has decided to come up with a spherical shaped haptic device with finger indentations. This design allows us to standardize the manner in which user will handle the haptic device. In addition, vibration feedback can be provided to the user`s individual fingers through the finger indentations. By placing the vibration feedback under the user`s finger and isolating the vibration of the motor from the haptic sphere structure, user will be able to better discriminate the vibration between the different motors,
🔗 External reference
Related Circuits
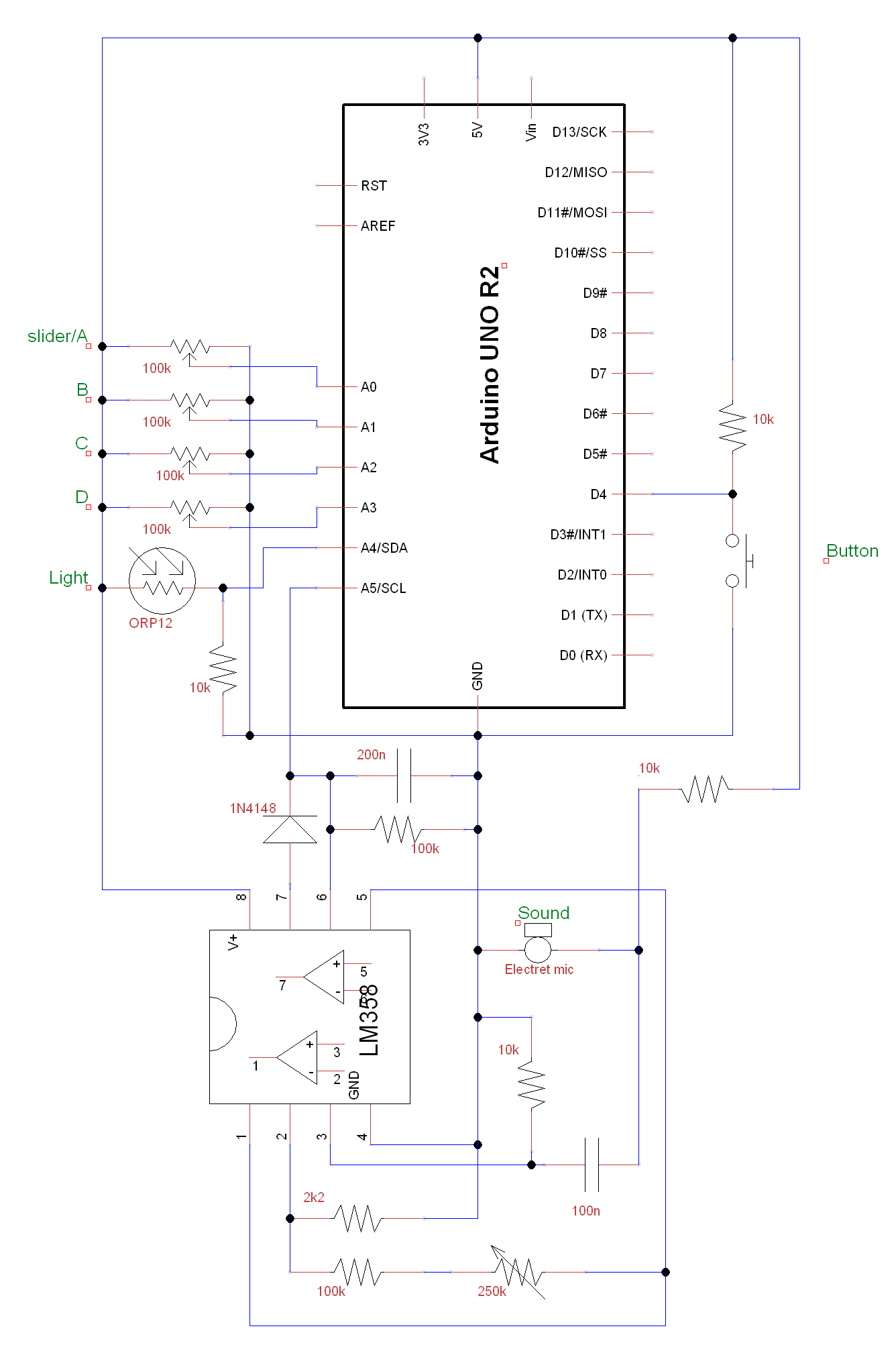
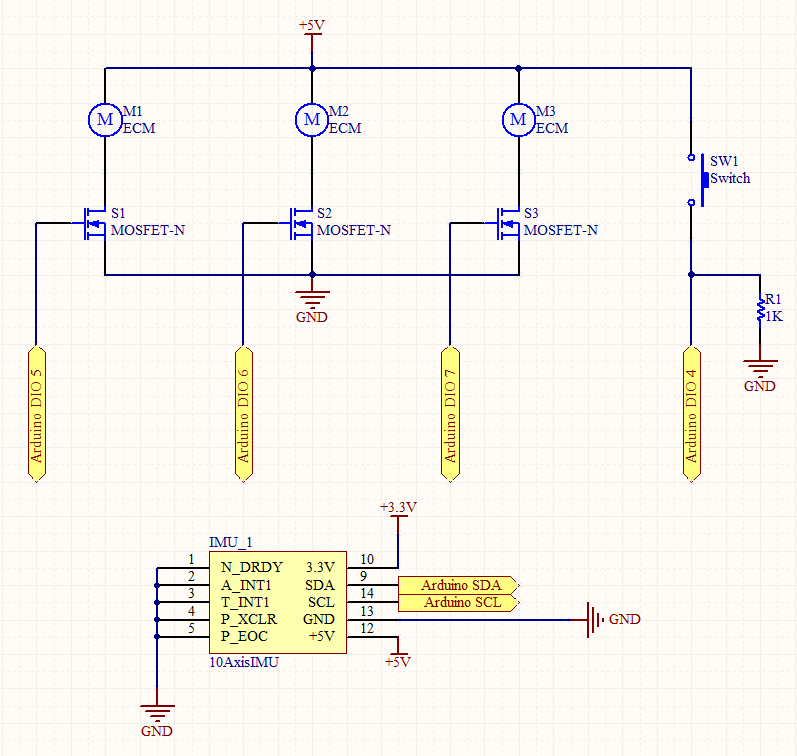
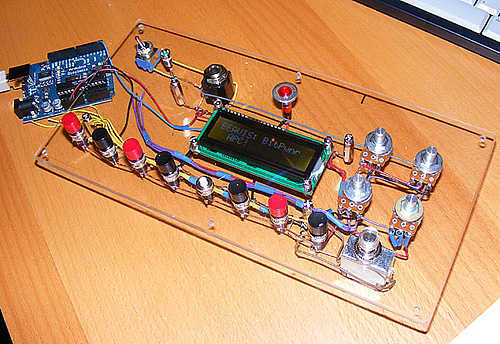
A circuit and Arduino code are designed to emulate a ScratchBoard approximately. The setup includes sound, light, a button, and four sliders, but it is not a direct replacement. It is important to change the COM ports in the...
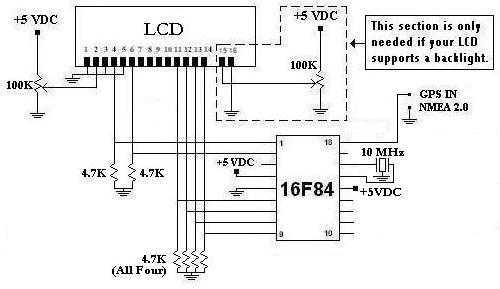
This is a project that I started back late 2003 when I just starting to learn PIC programming. I wanted to building something that actually did something useful. This project is based on a PIC16F84. I actually came up...
A programmable 8 step tone sequencer using an Arduino microcontroller. Features a 2 line x 16 character backlit LCD display The circuit design for the programmable 8 step tone sequencer based on an Arduino microcontroller incorporates several key components that...
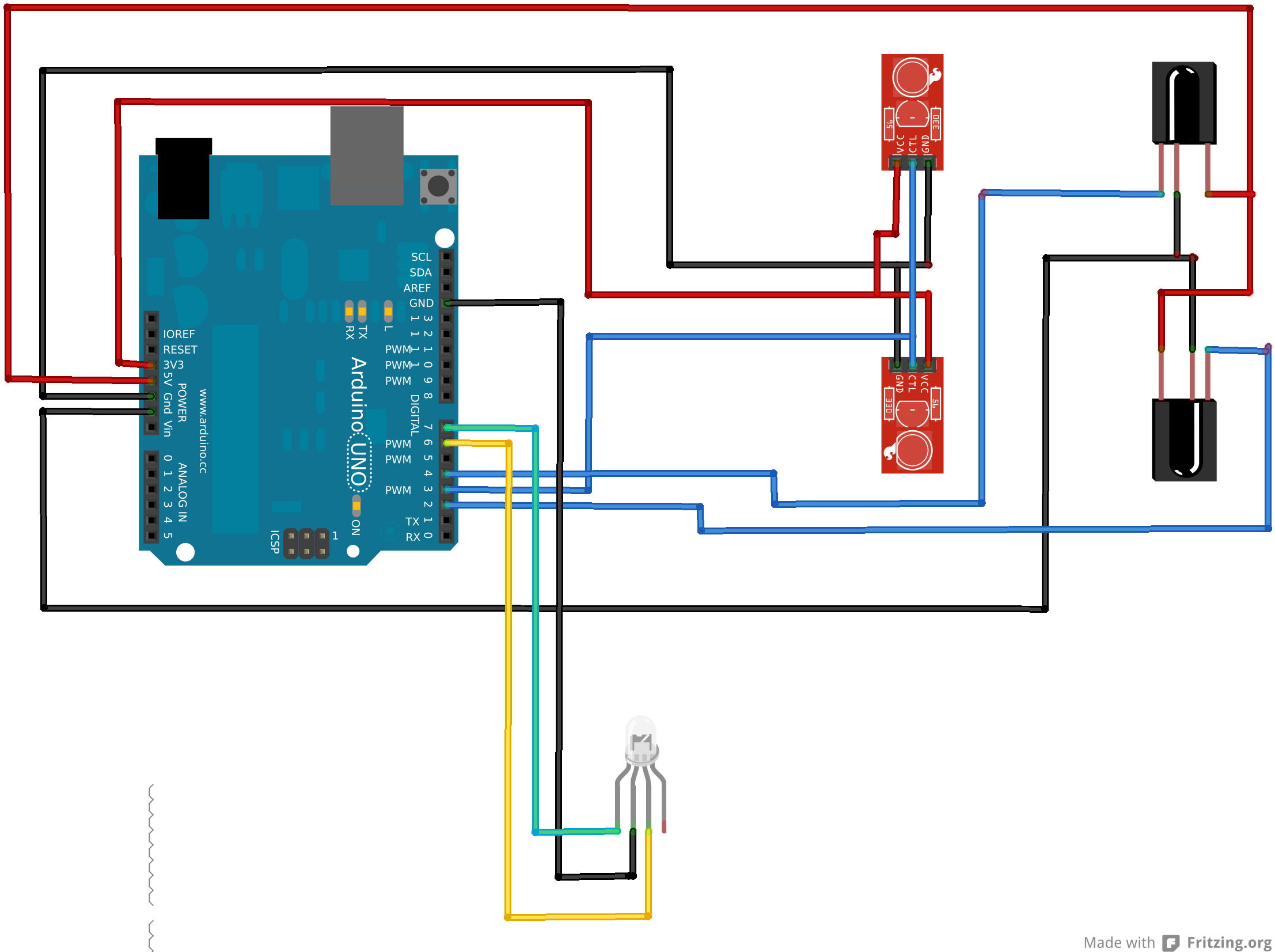
An Arduino Uno is connected to two infrared (IR) transmitters and their respective receivers. When one of the receivers detects a beam break, a strand of LEDs displays a pattern. While this setup functions correctly in principle, an issue...
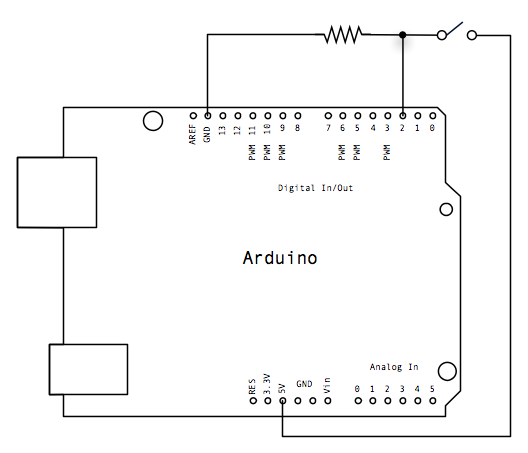
Connect three wires to the Arduino board. The first two, red and black, connect to the two long vertical rows on the side of the breadboard to provide access to the 5-volt supply and ground. The third wire goes...
Humanity has long grappled with the concept of Time, often seeking ways to interact with it meaningfully. A proposed solution is a knocking platform designed to address these fundamental needs, exemplified by the Knock Block KUI and its associated...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713