
beeper circuit
The described circuit is designed for simplicity and efficiency, allowing for basic functionalities without the need for a complex printed circuit board. The use of direct soldering onto the PIC microcontroller legs facilitates a compact design, which is especially beneficial in applications where space is limited. The inclusion of a flashing LED serves as a visual indicator, enhancing user awareness of the system's operational status. The adjustable resistor value for the LED ensures that the circuit can be optimized for brightness while adhering to current specifications, thus protecting the LED from damage.
The implementation of a fail-safe mechanism in PCM radios is crucial, as it maintains the last known channel positions during signal loss, thereby preventing potential model loss. The integration of a buzzer connected to GP2 provides an audible alert, which is essential for users who may inadvertently lose sight of their model. This feature, along with the programmable options available through the HEX file and C source code, allows for customization and flexibility based on user requirements.
The circuit's operation with a neutral position and the ability to configure the control positions enhances its usability. By allowing for the exclusion of reverse gear functionalities, users can simplify the control scheme to better suit their preferences. The design considerations, including the power specifications and connection details, ensure that the circuit operates reliably and efficiently in various scenarios. Overall, this schematic represents a practical solution for basic indicator and alert functions in electronic applications.For simplest functions (flashing indicator and/or beeper) you don`t need a printed circuit board, directly weld onto the legs of the PIC, an end of heat-shrinkable sleeve and that is. Go ahead with softness if you do not want to burn the integrated circuit (do not use an iron of more than 30 W)!
Do not rectify the legs of the circuits, that weaken s them, you will be likely to break them or worse than they break later in flight. - I put a LED connected on the output flashing indicator 0, 5 seconds. Of course it is not necessary if you do not want the flashing indicator! On the LED the + is the longest leg (side GP2 on the diagram). For a strong luminosity, resistance in series on the LED can be changed by one 220 Ohms (the current output under 5V is then 22mA and remains compatible with specifications ) For PCM radios with fail-safe at the reception, the loss of the transmitting signal is detected by the receiver. The position of the channels is maintained during the loss of the transmitting signal by receiver itself.
Thus we can`t detect a loss of the model by turning the radio OFF. With this kind of radio, I thus advise you to fulfill the function " loss model " on leg GP2 " flashing indicator 1/4 Hz ". The black wire of the buzzer will be connected at "minus -", the red wire with GP2. When you lost your model, think of rocking the switch starting the beep sound! After power on reset, the buzzer will sound during 5 seconds. - to program yours starting from HEX file provided here (2 versions are given : one for 12C508 PIC the other for the 12C509), or even compile the C source also provided (but I ask you not to market it).
Imagine that, compared to the neutral position of a radio channel (depth example), one has two positions to the top, two positions to the bottom and the neutral; the circuit functions as follows: Now, if you do not wish to use the functions related to the reverse gear, it is enough to put the handle, the linear potentiometer or it inter radio in low position. After the 5 seconds of adjustment of the neutral, there will remain to you only the functions associated to the two positons to the top and to theneutral in bottom.
🔗 External reference
Related Circuits
The output voltage is = 0.707 x Vin, at the center position. The output voltage is = Vin, at either extreme position. This circuit appears to describe a variable output voltage system, likely utilizing a potentiometer or a similar adjustable...
This is a simple circuit designed for an audio amplifier project to control the speaker output relay. The purpose of this circuit is to manage the relay that activates the speaker output in the audio amplifier. The circuit is...
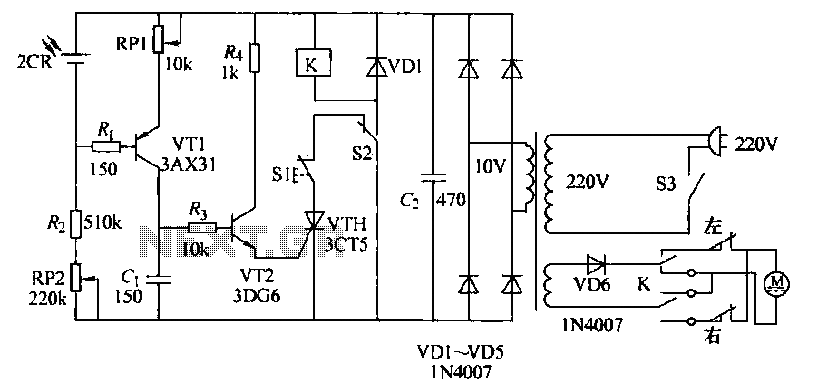
The circuit operates as follows: each morning, light enters the silicon photocell, generating a force that causes transistor VT1 to conduct. As a result, capacitor C charges, leading to an increase in voltage. This rising voltage causes the emitter...
This sound-activated switch allows for sound control, which can be beneficial not only for robotic applications but also for home automation. The sound-activated switch operates by detecting specific sound frequencies or patterns, enabling the user to control various devices or...
Figure 7-2 illustrates the FSK (Frequency Shift Keying) signal demodulation circuit, which is built using a digital phase-locked loop. This circuit features two oscillators operating at distinct frequencies: crystal oscillator X with a frequency of 983.04 kHz and crystal...

A simple transistor amplifier circuit diagram and schematic that can be used as a 12-watt audio transistor amplifier. An operational amplifier (op-amp) integrated circuit (IC) is used to produce the required gain. This circuit is designed to amplify audio signals,...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713