
build your own rc tank bot

1. Gather the necessary components, which include the robust Synapse Wireless RF100 modules with breakout boards, a Brutusbot Tank Kit, a Motor Driver Kit, and additional parts for building a controller.
2. Without connecting the LiPo battery, utilize the Synapse FTDI adapter board to connect one of the Synapse RF nodes to USB and upload the provided code. Follow the instructions from the accompanying PDF; a more detailed instructable will be available soon. Reconnect the battery once the upload is complete.
3. This RF network system is competitively priced, even against low-end RC transmission systems. Although a physical controller is not included, the system offers greater flexibility and versatility than standard RC links. Theoretically, a complete diagnostic link could be established between the tank and controller, enabling real-time transmission of sensor data and battery status.
4. The controller was originally constructed using a laser cutter; however, an alternative parts list has been compiled for those without such equipment. Point-to-point solder connections using bus wire will be necessary for this DIY controller. A kit form controller is also available, such as the ArbotiX Controller, which can easily integrate a Synapse module using the Synapse-Xbee adapter Kit. The ArbotiX system, designed by Trossen Robotics for Mech-Warfare competition robots, can be repurposed for non-competitive applications.
5. The project is termed a Tankbot rather than a generic RC tank because it employs a platform initially designed for robotics, utilizing user-programmable Synapse Wireless RF nodes that can control the tank autonomously or in a hybrid mode. The Tankbot can achieve autonomy by adding sensors and programming the onboard node for sensing, computing, and reacting. Additionally, the node can be connected to another microcontroller, such as an Arduino, allowing for over-the-air programming. A Dual H-bridge motor driver is required for the tank-side operation.
The RC Brutusbot project exemplifies the integration of wireless technology with robotics, providing a flexible platform for experimentation and learning. The use of Synapse Wireless RF modules enables a range of applications, from basic remote control to advanced autonomous operations. The modular nature of the components allows for customization and expansion, making it suitable for both hobbyists and educational purposes. The project encourages creativity and innovation, inviting builders to explore the potential of their designs while leveraging existing technologies.An alternate way to make your own Radio controlled system without a lot of the hassle of designing your own hardware from scratch. Here`s a look at the RC Brutusbot project in action: After currently submersing ourselves in Wireless RF networking and at the same time wondering how we could display a practical example of the new Brutusbot kit, we ended up putting 2
and 2 together as a matter of convenience and curiousity. It`s the classic illustration of looking around your present environment and saying Hey, what if we take this and combine it with this . . This approach may or may not have been inspired by Dave Hrynkiw who, not more than a week before us, came up with the BEAM tank-mouse he affectionately named; Herbert.
Included below is a description of how we built a Radio Controlled tankbot with Solarbotics parts and how you can build your own. 1. Gather the parts (pictured below), which include the not-so-well known but simple/robust Synapse Wireless RF100 modules and their breakout boards, a Brutusbot Tank Kit, a Motor Driver Kit, and some miscellaneous parts to build a controller.
3. WITHOUT your LiPo battery plugged in, use the Synapse FTDI adapter board to hook one of your Synapse RF nodes to USB and upload the code provided. For now you can follow the instructions from this PDF, I`m working on instructable that should be done this week that will better illustrate the steps in doing this.
Plug the battery back in once you are done using the USB port. In terms of cost, this RF network system seems to compete with even the most low end RC transmission systems. And even though you don`t really get a physical controller with this system, it is a lot more flexible and versatile than a standard RC link.
As a theoretical example (that we still might do one day) we could have had a complete diagnostic link between the tank and controller with the Tankbot sending sensor data and battery power results back to the controller for real-time, remote results. Now as you may have noticed the controller was not built with all the same parts listed above, as I created the original controller with a Laser cutter and I`m pretty certain not everyone has one of those yet (follow the Lasersaur project ).
So I made up a list of parts that will do the same thing minus the enclosure and buttons. With this portion of the project you`ll have to get out your bus wire to make several point-to-point solder connections. So it turns out that such a DIY controller does exist in kit form. I just had to go back into the memory banks a little bit. If you`d like a controller that is available for you to build as a kit, check out the ArbotiX Controller which you could adapt a Synapse module very easily to with the Synapse-Xbee adapter Kit.
The Arbotix system which was originally designed by Trossen Robotics for Mech-Warfare competition robots but could easily be re-purposed for more peaceful means. As a side note, in the same way, this Synapse Wireless based system could also be adapted to be used in exciting robot competitions such as Mech-Warfare.
I called this part of the project a Tankbot, instead of a generic RC tank, because it uses a platform that was originally designed for a robot and we are using Synapse Wireless RF nodes that are user-programmable and can be used to control the tank autonomously or as a hybrid autonomous/user-controlled system. The tankbot can easily become autonomous by adding sensors and programming the on-board node to sense, compute, and react.
You could even hook the node up to another microcontroller, such as an Arduino, and program it over the air. For the tank-side we needed an Dual H-bridge motor driver to handle the 🔗 External reference
Related Circuits

Despite the remarkable growth of wireless connections, analog POTS, or "plain old telephone service," continues to excel in terms of cost and availability. Credit card terminals and home security systems are two examples of older connected devices. However, the...
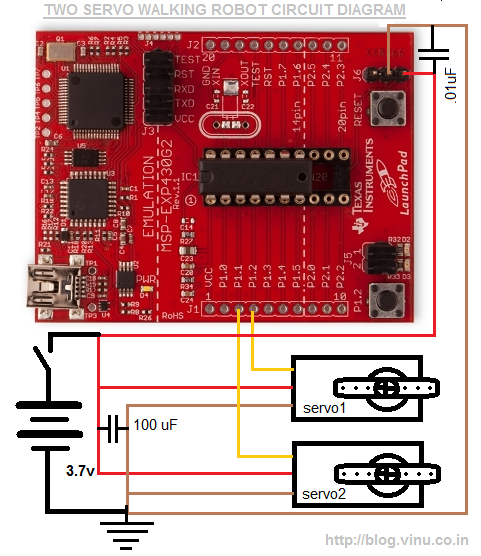
Two small servo motors were purchased last month, leading to the idea of creating a four-legged walker using these two servos. A friend suggested this project and shared a YouTube video demonstrating a similar concept. The design was developed...
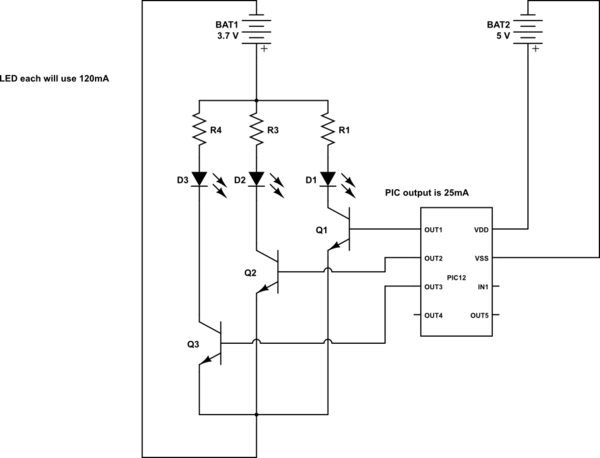
This is a conceptual schema utilizing a PIC12 microcontroller to control the blinking of three LEDs, each exhibiting different blinking patterns. There are several questions that need to be addressed. The circuit design involves a PIC12 microcontroller, which is a...
A stereo valve phono preamplifier has been constructed by a technician. The device requires a power transformer and various components, excluding the valves, which the technician recommends sourcing based on individual needs. Experienced DIY enthusiasts are invited to share...
The Line Following Robot sensor, also known as a surface scanner for robots, is a compact, stamp-sized infrared proximity detector that operates within a short range of 5-10 mm. It is based on a standard reflective opto-sensor, the CNY70...
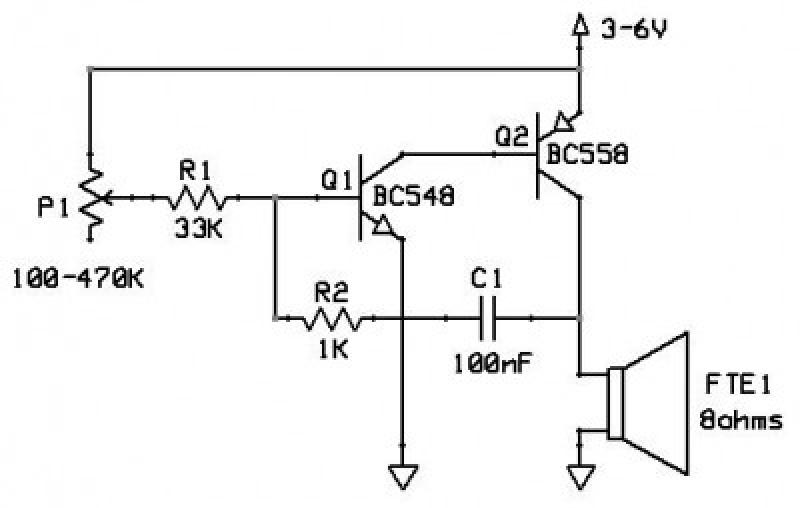
This circuit functions as an oscillator, capable of generating a sound wave or tone. The frequency of the tone, whether high or low, is adjustable via a variable resistor. The volume produced by this circuit is substantial; therefore, it...