
Code Collection

CrustCrawler specializes in the design and production of innovative walking robots, which incorporate advanced technologies and engineering principles to achieve improved mobility and functionality. These robots are typically characterized by their unique legged locomotion systems, allowing them to traverse a variety of terrains that may be challenging for traditional wheeled robots.
The walking robots developed by CrustCrawler often feature modular designs, enabling customization and the integration of various robotic accessories. This adaptability allows users to tailor the robots for specific applications, such as research, exploration, or industrial tasks. The robotic accessories may include sensors, cameras, or manipulation tools, enhancing the robots' capabilities and making them suitable for a wide range of scenarios.
In terms of electronic schematics, the walking robots likely utilize a combination of microcontrollers and motor drivers to control the movement of the legs. The microcontroller would process input from various sensors, such as gyroscopes and accelerometers, to maintain balance and navigate obstacles. The motor drivers would be responsible for powering the servos or stepper motors that actuate the legs, ensuring precise movement and coordination.
The power supply system is also a critical component, providing the necessary voltage and current for the motors and onboard electronics. Battery management systems may be integrated to monitor battery health and optimize performance. Communication protocols, such as I2C or SPI, may be employed for inter-module communication, enabling seamless operation of the robotic system.
Overall, the development of walking robots by CrustCrawler represents a significant advancement in robotics, combining cutting-edge technology with practical applications in various fields.CrustCrawler develops and manufactures cutting edge walking robots and robotic accessories.. 🔗 External reference
Related Circuits
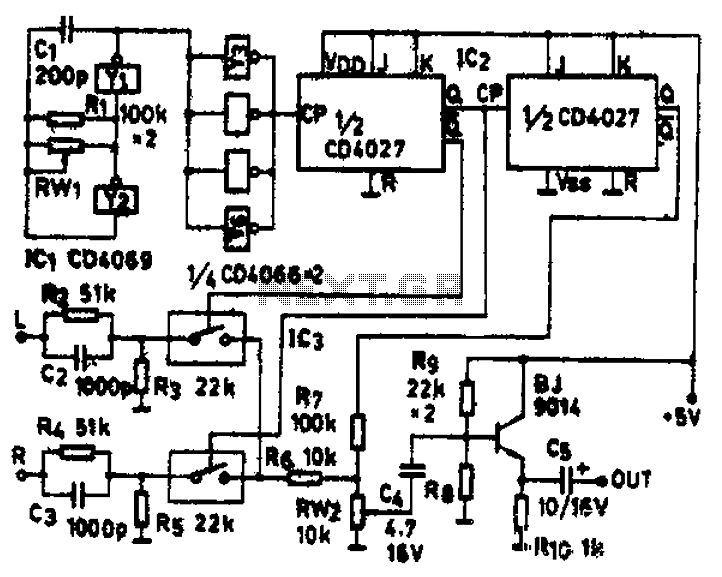
The circuit schematic diagram features IC1 (4069) and components Y1 and Y2, which together form a frequency oscillator operating at 76 kHz. Components Y3 to Y6 provide isolation and shape the output into the IC2 (CD4027) dual JK flip-flop,...
This article discusses the 128K EPROM (27C128), which was used in the 1986 to 1989 IROC-Zs equipped with the 1227165 ECM. The purpose is to provide a foundational understanding of binary and hexadecimal systems. Binary numbers consist solely of...
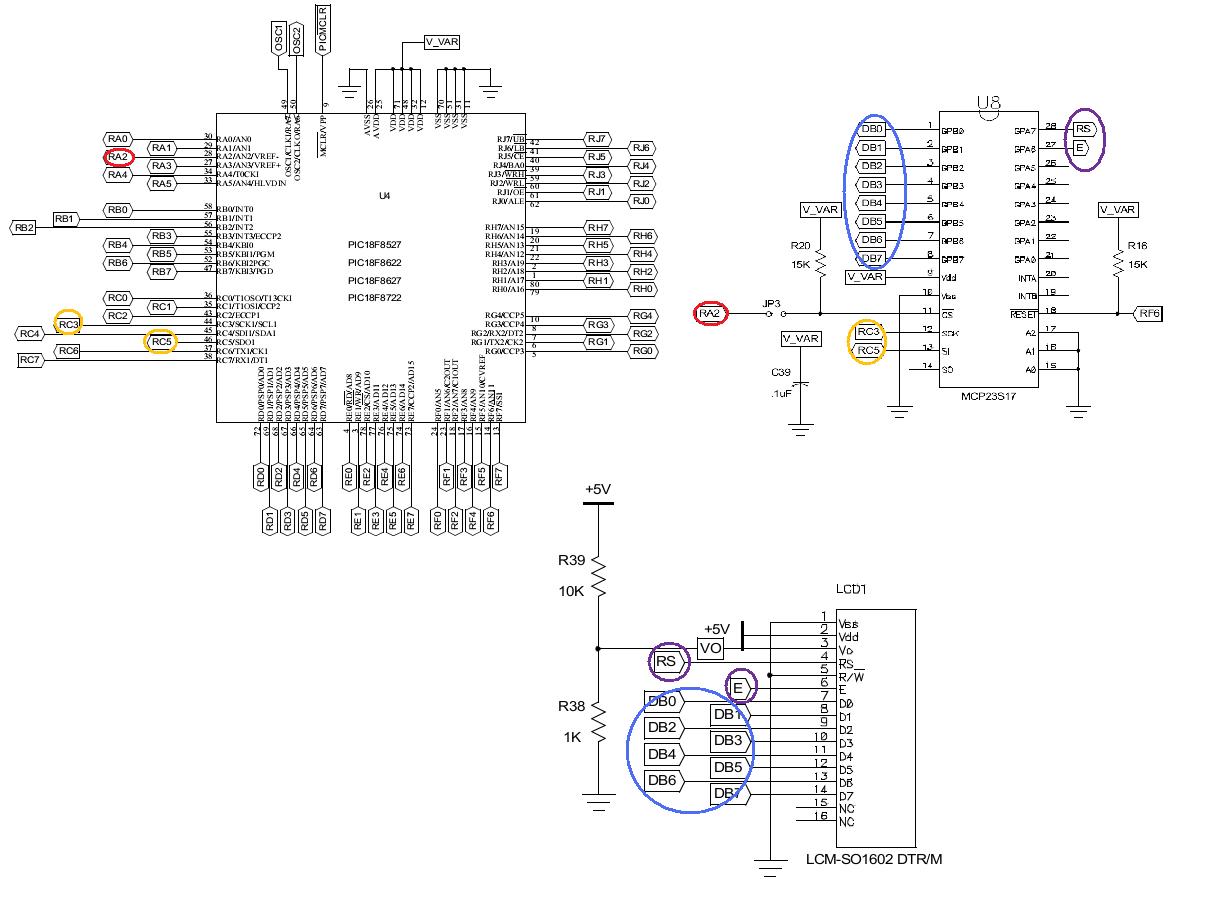
Learn to use the LCD display on the PIC 18 Explorer board with the SPI library. The SPI library will be utilized to easily display characters on the LCD. Additionally, the operation of I/O expanders will be explored. The PIC...
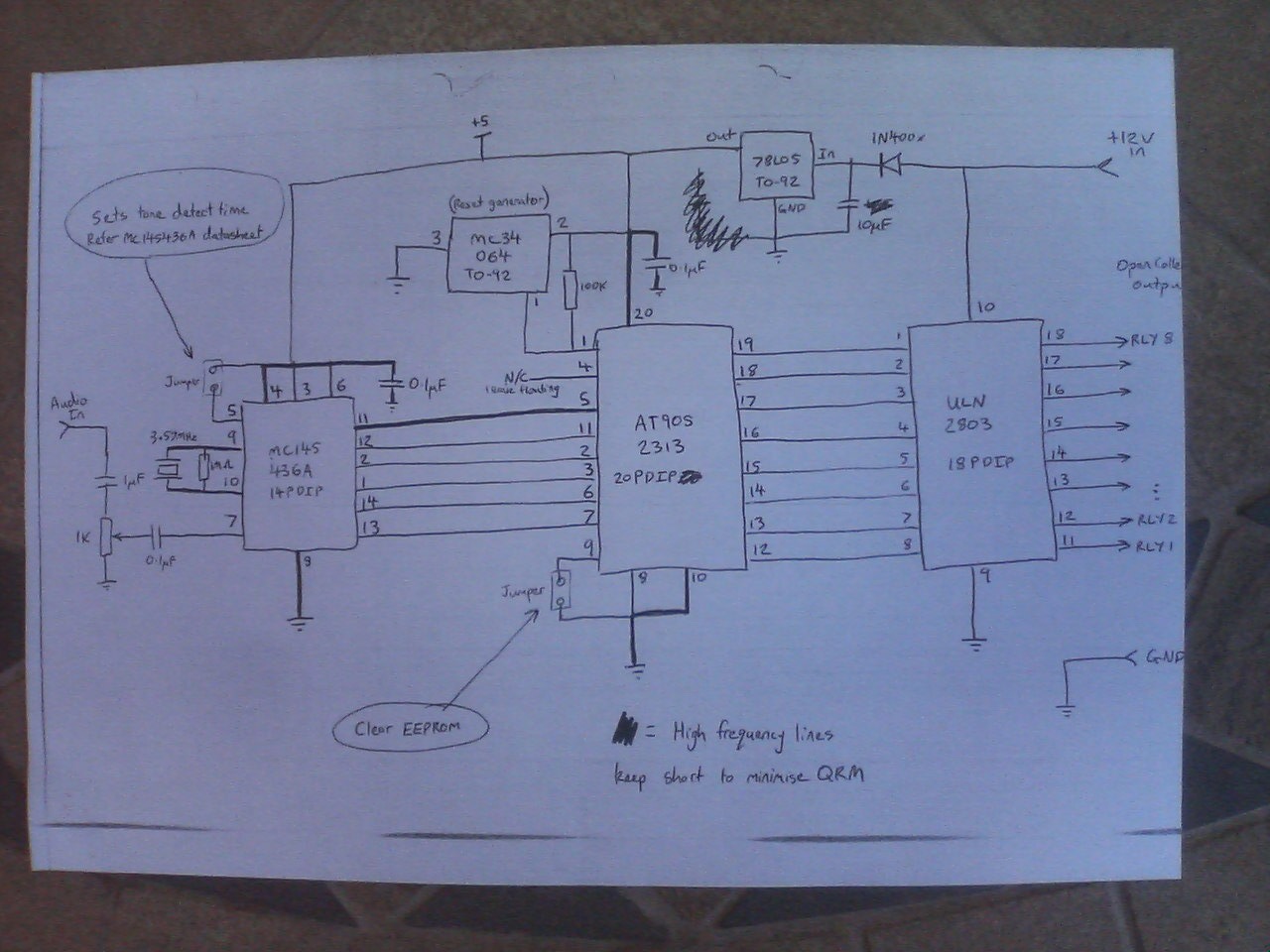
After a power interruption, all relays revert to their previous states, which are stored in non-volatile memory. A Motorola MC145436 DTMF decoder is utilized, clocked by a 3.58 MHz NTSC color burst crystal, providing a divide-by-8 clock output of...
The STK672-050 is a unipolar constant-current chopper-type externally-excited 4-phase stepping motor driver hybrid integrated circuit (IC) that utilizes MOSFET power devices. It features a built-in microstep operation-supported 4-phase distributed controller, enabling the realization of a high torque, low vibration,...
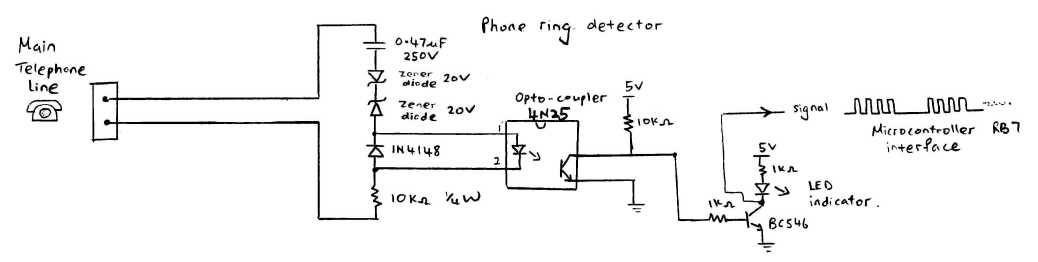
This circuit detects the dial tone from a telephone line and decodes the keypad pressed on the remote telephone. The dial tone heard when picking up the phone is referred to as Dual Tone Multi-Frequency (DTMF). This name originates...