
Controlling of Stepper Motor rotation in both direction using 8051 Microcontroller
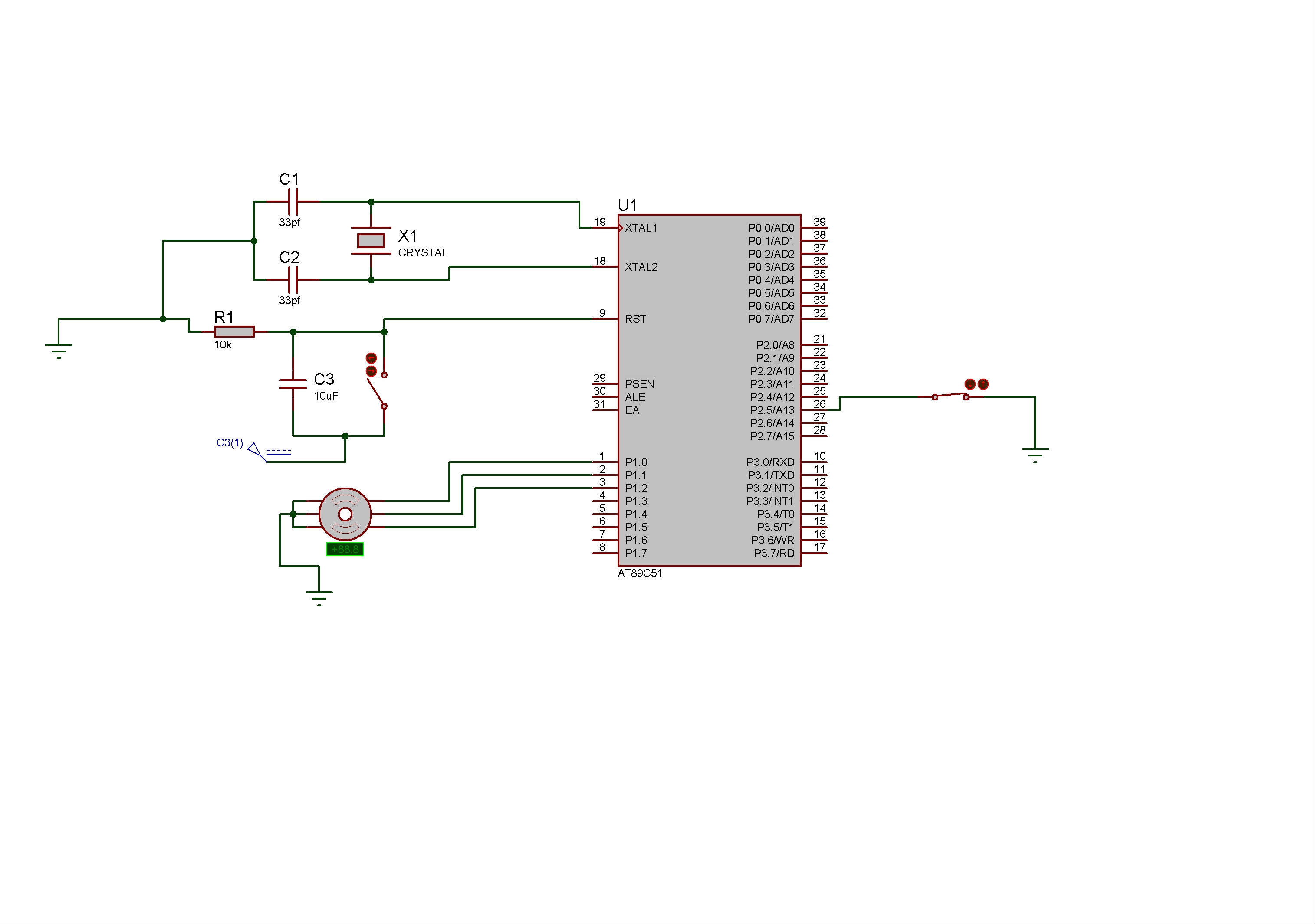
Stepper motors operate based on the principle of electromagnetic induction. The rotor, which is a permanent magnet, aligns itself with the magnetic field generated by the stator's electromagnets. The stator typically consists of multiple coils arranged in a specific sequence. When voltage is applied to these coils in a precise order, the magnetic field produced causes the rotor to step from one position to another, allowing for controlled movement.
The stepper motor's movement is characterized by discrete steps, which are defined by the number of poles in the rotor and the arrangement of the stator coils. The total number of steps per revolution can vary, with common configurations offering 200 steps per revolution (1.8 degrees per step) or 400 steps per revolution (0.9 degrees per step). This capability enables stepper motors to achieve high precision in positioning applications.
Control of a stepper motor is typically achieved through a driver circuit that sequences the voltage applied to the stator coils. The driver can be controlled using various methods, such as full-step, half-step, or microstepping techniques. Full-step operation energizes two coils at a time, while half-stepping alternates between energizing one and two coils, effectively doubling the resolution. Microstepping further divides each step into smaller increments, allowing for smoother motion and finer control.
In practical applications, stepper motors are widely used in robotics, CNC machinery, and 3D printers due to their ability to provide precise control of position and speed without the need for feedback systems. The simplicity of their control mechanisms and their robustness in various environments make them a popular choice for applications requiring accurate and repeatable motion.Stepper motors consist of a permanent magnet rotating shaft, called the rotor, and electromagnets on the stationary portion that surrounds the motor, called the stator. illustrates one complete rotation of a stepper motor. At position 1, we can see that the rotor is beginning at the upper electromagnet, which is currently active (has voltage applied.
🔗 External reference
Related Circuits
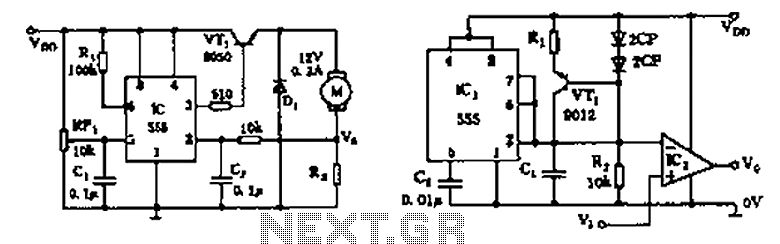
The circuit consists of a 555 motor automatic governor configuration. It includes flip-flops, a 555 timer, and a switching tube. A sampling circuit is formed by connecting R7 and the motor in series. RP1 is used to control the...
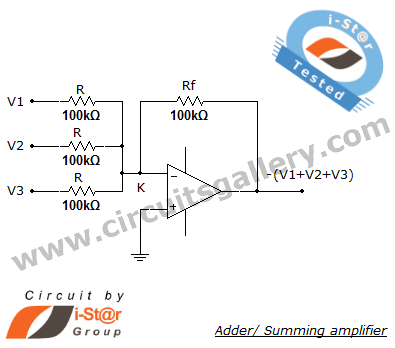
A summing amplifier, also known as an adder, is utilized to combine two or more signal voltages. This voltage adder circuit is straightforward and allows for the addition of multiple signals. It has a wide range of applications in...
The interval between rings can be adjusted by changing the value of the 1 Meg resistor. A 70 volt, 30 Hz ringing voltage is generated from the 120 volt side of a small 12.6 VAC power transformer (Radio Shack...
A dual benefit for battery-powered portable devices is provided by Class D audio amplifiers. They produce much less power dissipation than their linear counterparts. Class D audio amplifiers, also known as switching amplifiers, are designed to achieve high efficiency and...
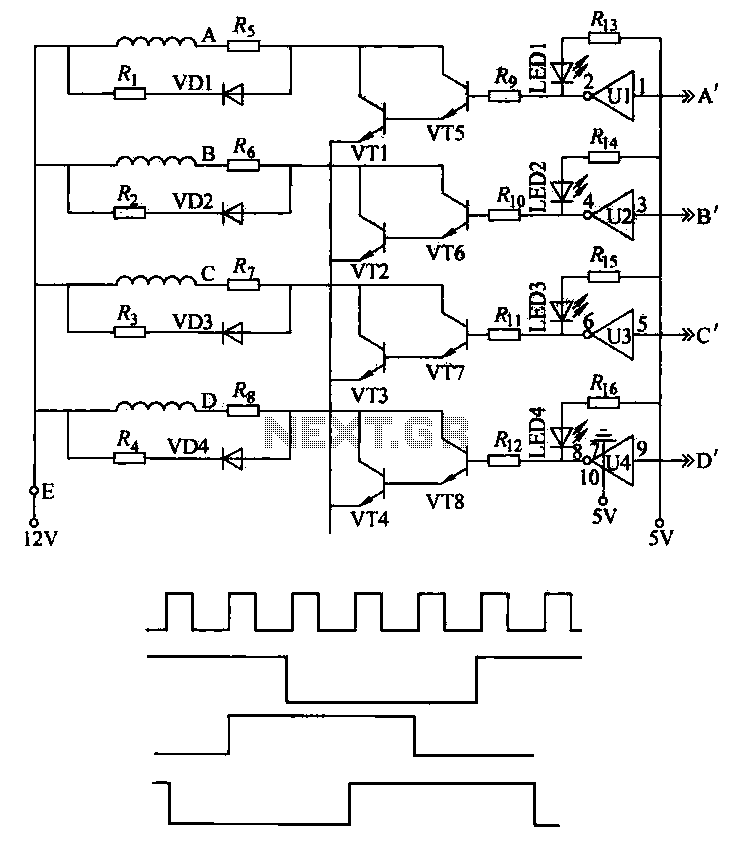
This machine utilizes the FD-CAS-923 1-stepper motor control experiment board with a 4-phase stepper motor to avoid its schematic shown in Figure 4-42a. The JK1 cop 40 core flat cable connector allows for signal arrangements compatible with EICE51 simulation...
This is a Class D audio amplifier circuit used to control the PWM motor speed. This circuit has two advantages for battery-powered portable devices. First, it provides high efficiency, which extends battery life. The Class D audio amplifier operates by...