
Fighting Robot circuit
The proposed system is a robotic fire detection and extinguishing unit that integrates fuzzy logic control with microcontroller technology. The robot is equipped with a series of sensors, including temperature sensors and smoke detectors, to identify the presence of a fire. The temperature sensors can detect rapid increases in heat, while the smoke detectors can sense the presence of combustion gases.
The microcontroller serves as the brain of the robot, processing inputs from the sensors and executing control algorithms based on fuzzy logic principles. Fuzzy logic is particularly well-suited for this application due to its ability to handle imprecise inputs and make decisions based on degrees of truth rather than binary outcomes. This allows the robot to assess the severity of the fire and determine the appropriate response.
The robot's mobility is facilitated by a set of wheels or tracks, enabling it to navigate through the model structure. It is programmed to follow a predefined path or utilize obstacle avoidance algorithms to reach the source of the fire. Once the fire is detected, the robot activates a blower system designed to extinguish the flames. The blower can be powered by a rechargeable battery, ensuring that the robot remains operational for extended periods without needing a power source.
In addition to fire detection and extinguishing capabilities, the design also incorporates features aimed at minimizing air pollution. The blower system can be equipped with filters or other mechanisms to reduce the release of harmful particulates into the environment during operation.
This project not only demonstrates the feasibility of an autonomous fire-fighting robot but also highlights the importance of integrating advanced control systems and environmental considerations into the design of modern safety devices. The successful implementation of this prototype could lead to further advancements in fire safety technology, potentially saving lives and property while promoting a cleaner environment.The need for a device that can detect and extinguish a fire on its own is long past due. Many house fires originate when someone is either sleeping or not home. With the invention of such a device, people and property can be saved at a much higher rate with relatively minimal damage caused by the fire. Our task as electrical engineers was to design and build a prototype system that could autonomously detect and extinguish a fire.
Also aims at minimizing air pollution.In this Project we design a Fuzzy based Microcontroller controlled Robot. It is the Robot that can move through a model structure, find a burning oil derrick (lit candle) and then extinguish it with help of a Blower. This is meant to simulate the real world operation of a Robot performing a fire extinguishing func 🔗 External reference
Related Circuits
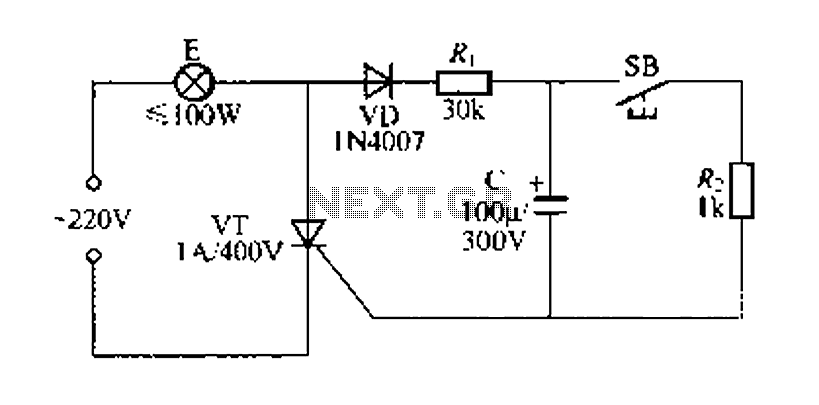
Figure 57 illustrates a simple delay lamp circuit that connects to lamp E using a two-wire connection. This design allows for the security bars to be installed directly, enabling replacement with a standard wall switch without altering the existing...

The circuit diagram of the device features a 555 timer IC configured as a transmitter and a receiver, divided into two sections. The 555 timer in the transmitter section serves as the core component of a frequency oscillator. The...
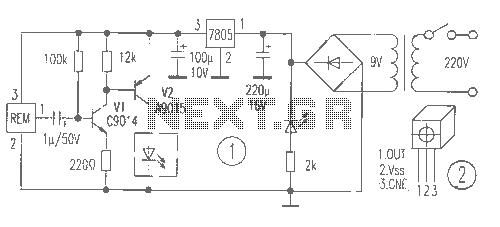
The receiver provides two TV signals, one for the living room and another for the bedroom, along with a satellite receiver. Watching television in the bedroom is convenient in Taiwan; however, when watching television in the living room, it...
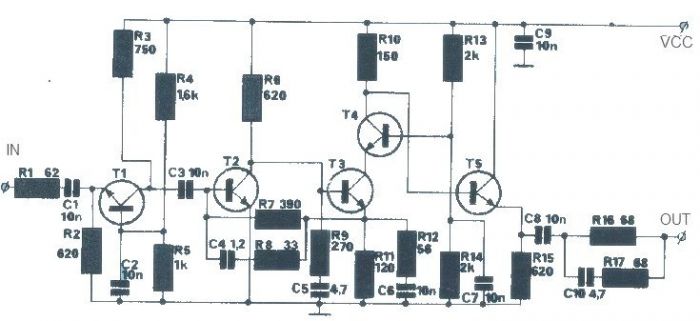
The T1 transistor must be of the BF200 type (or a similar variant), while the other transistors can be of the BF214 type. To achieve high efficiency, the antenna amplifier should be positioned at a short distance from the...
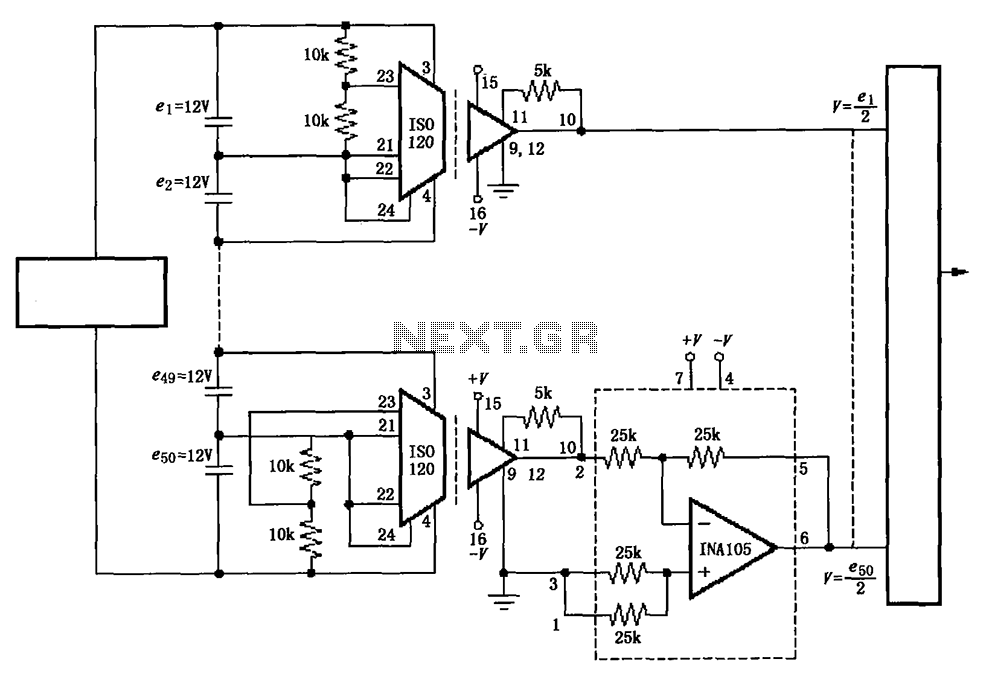
The circuit utilizes the ISO120 and INA105 instrumentation amplifiers to create a battery monitoring system for a 600V battery setup composed of 50 series-connected 12V batteries. This circuit is designed to detect charging and discharging conditions to prevent overcharging...
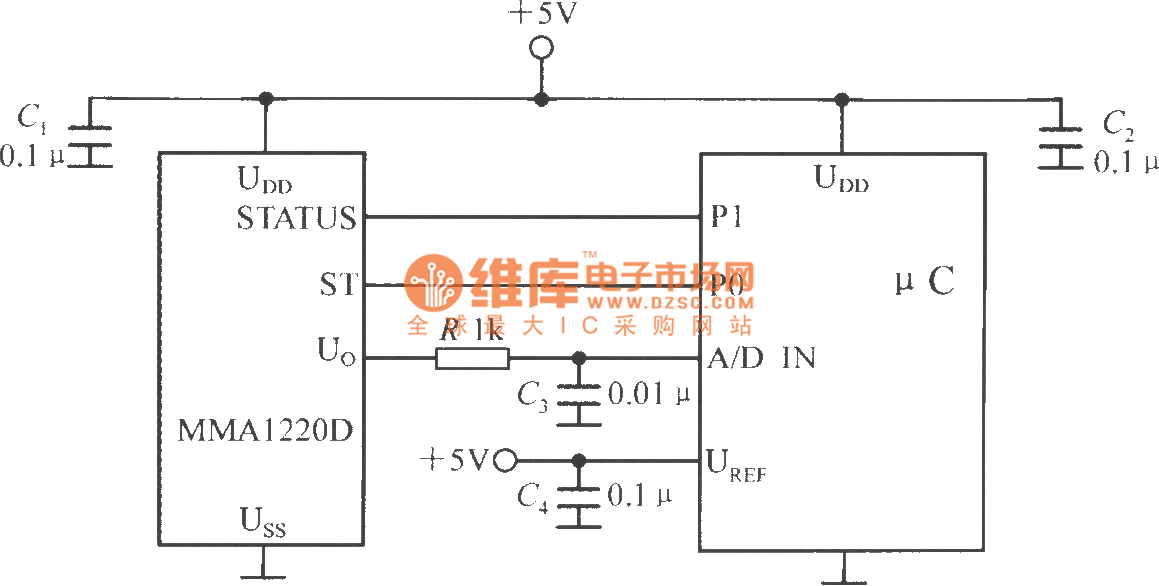
The microcontroller within the A/D converter can utilize a PIC MCU produced by Microchip. The MMA1220D's state and self-test pins are connected to the P1 and P0 ports of the microcontroller, with its output voltage sent to the input...